
موتورهای الکتریکی که در کاربردهای رباتیک مورد استفاده قرار می گیرند ، به طور عمده به دو دسته DC ، Stepتقسیم می شوند . از لحاظ مدارات کنترلی ، این دو دسته با یکدیگر تفاوتهایی دارند ، ولی از لحاظ پیچیدگی هر دو در یک سطح قرار دارند . از لحاظ روشهای کنترلی موتورهای step را می توان به صورت حلقه باز کنترل نمود (به دلیل دقت ذاتی موتورها)ولی موتورهای DC چون دقیق نیستند ، برای چرخش با سرعت ثابت و یا رسیدن به مکانی خاص ، باید به صورت حلقه بسته کنترل شوند.(یعنی باید با استفاده از شیفت انکودر از خروجی فیدبک گرفته ، و به ورودی مقایسه اعمال نمود.)این امر ، برنامه نویسی و الگوریتم های کنترلی را مشکل می نماید . از لحاظ جریان مصرفی نیز ، عموماً موتورهای DC جریان کمتری را مصرف می نمایند و این امر موجب صرفه جویی در مصرف باتری می شود .
نحوه حرکت موتورهای الکتریکی

کلید فهمیدن اینکه موتورهای الکتریکی چگونه کار می کنند فهمیدن نحوه عملکرد آهن ربای الکتریکی است؛ آهن ربای الکتریکی مبنای کار موتورهای الکتریکی است.
اگر سیمی حدود 10 سانتی متر بردارید و به دور میخی بپیچید و دو سر آنرا به دو سر یک باطری وصل کنید، زمانیکه جریان از سیم عبور می کند یک میدان مغناطیسی در اطراف سیم ایجاد می شود و آن میخ تبدیل به آهنربا می شود. این میدان تا زمانیکه جریان از سیم عبور میکند وجود دارد، یعنی تا زمانیکه دو سر سیم به باطری متصل باشد؛ و زمانیکه این اتصال قطع شود، این میدان نیز از بین می رود. آن سر میخ که به قطب مثبت باطری وصل شده S و سر دیگر را که به قطب منفی باطری وصل شده N می نامیم.
حال اگر یک آهن ربای نعلی شکل بردارید و این میخ را به صورت معلق در وسط این آهن ربا قرار دهید به طوریکه میخ کاملآ افقی قرار گرفته و قطب N میخ در مقابل قطب N آهن ربا ی نعلی شکل قرار بگیرد و قطب دیگر میخ نیز به همین صورت در این وضعییت میخ 180 درجه خواهد چرخد تا قطب N میخ در مقابل قطب S آهنربا و قطب S میخ در مقابل قطب N آهن ربا قراربگیرد. همانطور که میدانید دو قطب متضاد همدیگر را جذب و دو قطب همسان همدیگر را دفع می کنند که حرکت میخ نیز در آهن ربای نعلی شکل به همین صورت است.
حرکت موتورهای الکتریکی نیز در واقع از همین قانون پیروی می کند؛ ما هر بار که در یک موتور پله ای یک سیم پیچ را تحریک می کنیم در واقع قطبهای N و S را در داخل موتور ایجاد میکنیم و روتور نیز مثل آن میخ و با استفاده از قانون جذب و دفع قطبها به حرکت در می آید و این حرکت همان چیزی است که ما به صورت فیزیکی از موتور مشاهده می کنیم.
ویژگی های موتور DC :
موتور های DC دارای مدارات درایور گوناگون و الگوریتم های مختلفی برای کنترل می باشند که در زیر به آنها اشاره ای می شود . از مزایای این موتورها ، ارزان بودن و ساده بودن مدارات درایور (راه انداز) آنهاست این موتورها به همراه گیربکس نیز بکار می روند.(جهت کم کردن سرعت و بالا بردن قدرت آنها)
انتخاب موتور :
یک پارامتر مهم در طراحی ربات انتخاب موتور هاست . موتورها باید سرعت ، گشتاور و استراتژی مناسبی برای کنترل داشته باشند .
در این قسمت مطالبی در مورد مشخصات موتور های DC بیان می شود.
اصول کار موتور های DC :
علاوه بر انتخاب نوع موتور ها ، قطر چرخ ها و نوع چرخ دنده هایی که برای کاهش سرعت موتورها استفاده می شود(گیربکس) بر عملکرد ربات تاثیر می گذارند .
موتورهای DC دو ویژگی بسیار مهم دارند :
1 – سرعت موتور تابعی از ولتاژ اعمال شده به دو سر آن است .
2 – گشتاور خروجی موتور تابعی از مقدار جریانی است که موتورها از باتری می کشد . به عبارت دیگر اگر ولتاژ بیشتری به موتور اعمال شود سرعت چرخش موتور افزایش می یابد و اگر جریانی که از موتور می گذرد بیشتر باشد گشتاور بیشتری تولید خواهد کرد .
رابطه ی بین دور موتور با ولتاژ و گشتاور با جریان در رابطه ی زیر نشان داده شده است .(Kv ثابت سرعت موتور و Kt ثابت گشتاور موتور است)
PRM = Kv * Volts
Torque = Kt * Amps
سرعت موتور :
طبق فرمول اول سرعت موتور فقط تابعی از ولتاژ اعمال شده به دو سر آن است . اما این رابطه به صورت دقیق برای موتورهای ایده آل برقرار است .
هنگامی که شفت موتور زیر بار قرار می گیرد سرعت موتور کاهش می یابد و اگر مقدار بار آن افزایش یابد و گشتاور کافی به آن اعمال شود می توان آنرا متوقف نمود . کاهش سرعت موتور به علت تلفات ولتاژ درونی موتور است که هنگام عبور جریان از موتور ایجاد می شود . همه ی موتورها مقدار معینی مقاومت داخلی دارند.
ولتاژ موثری که عملاً در موتور مورد استفاده قرار می گیرد با (Vmotor) نشان داده می شود. در رابطه ی زیر چگونگی محاسبه ی این ولتاژ ارائه شده است . Vin ولتاژ ورودی موتور است که در ترمینال پایانی به موتور اعمال می شود. Iin جریانی است که از موتور کشیده می شود . R مقاومت اهمی داخلی موتور است .
Vmotor = Vin – R Iin
با جایگزین کردن Vmotor بجای Volts در رابطه ی قبلی ، رابطه ی دقیق بین سرعت موتور و ولتاژ موثر بدست می آید . در قسمت دوم ، رابطه ی بین سرعت موتور با ولتاژ ورودی و جریان عبوری از موتور بدست می آید .
PRM = Kv Vmotor = Kv (Vin – R Iin)
طبق فرمول فوق سرعت موتور با ولتاژ ورودی و جریان عبوری از موتور رابطه ی مستقیم دارد .
گشتاور موتور :
گشتاور موتور و جریان عبوری از آن با هم رابطه ی مستقیم دارد و این تناسب به شکل دقیق تری در رابطه ی زیر بیان شده است . با در نظر گرفتن انرژی مورد نیاز برای راه اندازی موتور این رابطه تغییرات جزئی خواهد داشت . هنگامی که موتور در شرایط بی باری قرار دارد (حالتی که موتور زیر بار نیست و آزادانه می چرخد) جریان کمتری از باتری کشیده می شود . بخشی از این جریان بخاطر مقاومت داخلی موتور و بخشی از آن صرف غلبه ب اینرسی و اصطکاک داخلی موتور می شود . جریانی که برای غلبه بر این تلفات مورد استفاده قرار می گیرد جریان بی باری نام دارد .
موتورهای DC بطور طبیعی سرعت خود را حفظ می کنند . وقتی یک گشتاور خارجی بر روی شفت موتور اعمال می شود موتور به طور اتوماتیک جریان بیشتری را از باتری می کشد و سرعت اولیه خود را حفظ می کند . در این حالت اضافه جریان برای ایجاد گشتاور اضافی بکار میرود .
فرمول محاسبه ی مقدار جریان در رابطه ی زیر بیان شده است . مقدار Iin یک پارامتر مهم در انتخاب اندازه باتری و مدار درایور است.
Iin = Io + (Torque / Kt)
از ترکیب دو رابطه ی بالا رابطه ی جدیدی ایجاد می شود که رابطه ی بین سرعت چرخش موتور با ولتاژ ورودی و گشتاور را بیان می کند .
PRM = Kv (Vin – R (Io + (Torque / Kt))
جریان توقف :
روابط ارائه شده برای موتور های DC معمولاً تا سقف مشخصی از جریان برقرار است . اگر موتورها بیش از اندازه در زیر بار قرار گیرند معمولاً وضعیت پیچید ای به وجود می آید . در شرایط کاری نامتعادل موتور ، بسیاری از پارامتر ها باید مورد بازبینی قرار گیرد .
هنگامی که گشتاور خارجی به موتور اعمال می شود و موتور زیر بار قرار می گیرد جریان بیشتری از باتری ها کشیده می شود همچنین سرعت موتور به طور قابل توجهی کاهش می یابد . اما اگر گشتاور خارجی بیش از اندازه زیاد شود موتور متوقف خواهد شد . در این حالت موتور جریان Max را از باتری می کشد که جریان توقف نامیده می شود (Istall).
با توجه به نوع موتور جریان توقف تا سقف 100 امپر افزایش می یابد.جریان توقف از رابطه ی زیر بدست می آید .
Istall = Vin / R
وقتی موتور متوقف شد کشیدن جریان از باتری ادامه خواهد یافت . با توجه به مقدار جریان یکی از سه حالت زیر ایجاد خواهد شد :
- تخلیه ی باتری
- سوختن مدار درایور موتور
3- سوختن موتور
تمام این اتفاقات در کمتر از چند ثانیه رخ می دهد .
مقدار جریان توقف مهمترین پارامتر انتخاب اندازه ی موتور ، مدار درایور و جریان Max باتری هاست . در برخی موارد قیمت مدار درایور بیش از قیمت موتورهاست . لذا باید توانایی مدار درایور خود در راه اندازی موتور مطمئن شویم . در این حالت جریان پیک مدار درایور باید از جریان توقف موتورها بیشتر باشد . در غیر این صورت باید از یک فیوز بین مدار درایور و موتور استفاده نمود . هنگام توقف موتور و عبور جریان توقف فیوز خواهد سوخت . سوختن فیوز مانع از اسیب دیدن مدار درایور میگردد.
جایگزین کردن فیوز سوخته سریعتر و اقتصادی تر از مدار درایور است.

توان و بازده :
پارامتر دیگر در انتخاب موتور توان و بازده هستند. از دیدگاه مکانیکی توان موتور محصول گشتاور و سرعت شفت موتور است . از دیدگاه الکترونیکی توان محصول ولتاژ و جریان است .
بازده در حالت کلی نسبت توان خروجی به ورودی است به عبارت دیگر بازده مقدار تبدیل توان الکتریکی ورودی (Pin) به توان خروجی مفید(Pout) است.
رابطه ی زیر رابطه ی بازده با توان ورودی و خروجی را بیان می کند . یکای استاندارد توان در کلیه ی روابط وات است .
Pin = Vin Iin
Pout = (Iin – Io) (Vin – Iin R)
Efficiency = Pout / Pin
توان ورودی هیچگاه از توان خروجی بیشتر نخواهد شد . اختلاف توان ورودی و خروجی به علت تلفات دینامیکی ، الکتریکی و اصطکاک است که در داخل موتور ایجاد می شود .
مقدار تلفات با تو جه به شرایط بارگذاری تغییر می کند . انرژی تلف شده به گرما تبدیل شده و باعث گرم شدن موتور هنگام چرخش می شود .
عملکرد موتور به شرایط محیطی نیز وابسته است . جریان عبوری از موتور قابل کنترل نیست و هیچگاه نمی توان موتور را به ایجاد گشتاور خروجی معینی وادار کرد . تنها پارامتر قابل کنترل موتور ولتاژ ورودی آن است .
اندازه گیری مقاومت داخلی موتور :
برای محاسبه ی مقاومت داخلی نمی توان از اهم متر استفاده کرد و باید آنرا محاسبه کرد .
ابتدا موتور و شفت را در جای خود ثابت کنید (بگونه ای که موتور حرکت دورانی نداشته باشد ) سپس یک ولتاژ dc کوچک به موتور اعمال نمایید (1.5 تا 3 ولت) این ولتاژ باید از مقدار ولتاژ نامی کمتر و به قدری باشد که باعث چرخش شفت موتور شود . مقدار ولتاژ باید در تمامی مراحل آزمایش ثابت باشد .
آزمایش باید به سرعت انجام شود تا باعث گرم شدن موتور نگردد . موتور گرم نتیجه ی آزمایش را تحریف خواهد کرد زیرا مقاومت داخلی موتور بر اثر گرما تغییر می کند . در قسمت بعد ولتاژ و جریان موتور را در یک لحظه ی مشخص اندازه گیری نمایید . مقاومت داخلی از رابط ی زیر قابل محاسبه است .Vin و Iin مقادیر ولتاژ و جریان اندازه گیری شده هستند .
R = Vin / Iin
مدارات درایور موتور :
ساده ترین روش کنترل موتور استفاده از یک کلید برای روشن و خاموش کردن موتور است . با قرار دادن یک کلید بین باتری و موتور می توان قدرت موتور را کنترل نمود . اگر چه کلید ها با این ساختار برای کنترل موتور بکار نمی روند . اما اصول کلی کنترل موتور این است .
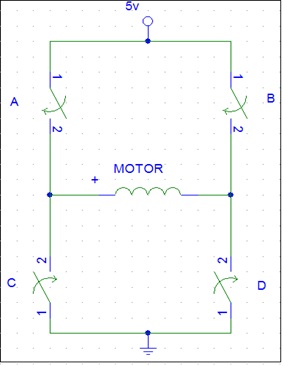
ترتیب کلید ها و عملکرد موتور :
جدول منطقی شکل زیر عملکرد موتور را با توجه به عملکرد کلیدها بیان می کند . کلیدها 16 حالت مختلف را می پذیرند که این حالت ها باعث ایجاد 5 نوع عملکرد مختلف در موتور می شود .
| عملکرد موتور | D | C | B | A |
| چرخها آزاد | 0 | 0 | 0 | 0 |
| چرخها آزاد | 1 | 0 | 0 | 0 |
| چرخها آزاد | 0 | 1 | 0 | 0 |
| ترمز | 1 | 1 | 0 | 0 |
| چرخها آزاد | 0 | 0 | 1 | 0 |
| اتصال کوتاه | 1 | 0 | 1 | 0 |
| حرکت معکوس | 0 | 1 | 1 | 0 |
| اتصال کوتاه | 1 | 1 | 1 | 0 |
| چرخها آزاد | 0 | 0 | 0 | 1 |
| حرکت مستقیم | 1 | 0 | 0 | 1 |
| اتصال کوتاه | 0 | 1 | 0 | 1 |
| اتصال کوتاه | 1 | 1 | 0 | 1 |
| ترمز | 0 | 0 | 1 | 1 |
| اتصال کوتاه | 1 | 0 | 1 | 1 |
| اتصال کوتاه | 0 | 1 | 1 | 1 |
| اتصال کوتاه | 1 | 1 | 1 | 1 |
- حالت ترمز (brake): در این حالت موتور بسرعت کند می شود و متوقف می گردد و در برابر چرخش از خود مقاومت نشان دهد .
- حالت چرخها آزاد (free wheel): در این حالت موتور سرعت خود را کند می کند اما در برابر نیروی محرکه ای که از طرف شفت موتور به آن اعمال می شود مقاومتی از خود نشان نمی دهد .
- حالت مستقیم (Forward) و معکوس(Reverse): که به معنی چرخش ساعتگرد و پاد ساعتگرد است .
- اتصال کوتاه (Short circuit): حالتی که همواره باید از آن اجتناب کرد و به معنی اتصال باتری به زمین است .
از نتایج فوق فقط حالت مستقیم و معکوس مورد نظر ماست و بقیه غیر کاربردی و مخرب هستند . از ترکیب حالت ها 6 مورد اتصال کوتاه ایجاد میکند که همانطور که گفته شد معمولاً شرایط خطرناکی را ایجاد می کند و باعث خراب شدن مدار درایور ، باتری و… می شود .
برای طراحی مدار درایور از رله ، ترانزیستور ، آی سی و یا ترکیبی از آنها استفاده می شود.
- کنترل با رله
کنترل با رله یک راه ساده و ارزان قیمت است که در شکل زیر نشان داده شده است . در این روش با استفاده از یک سطح منطقی و با ولتاژ پایین ، موتور هایی که با ولتاژ بالا کار می کنند کنترل می شوند . ولتاژ پایین برای خاموش و روشن کردن رله بکار می رود و رله با انتقال نیروی محرکه از باتری به موتور آنها را راه اندازی می نماید .
- کنترل با ترانزیستور
کلید مکانیکی رله ها معمولاً با قطعه های الکترونیکی دیگر از جمله ترانزیستور ها کنترل می شوند . زیرا سیم پیچ رله های مینیاتوری معمولی به جریانی دست کم 20 تا 100 میلی آمپر برای راه اندازی نیاز دارند . از آنجایی که اکثر میکروکنترولرها نمی توانند این جریان را تامین کنند ، از یک ترانزیستور برای کنترل رله استفاده می شود .
توضیحات تکمیلی را بصورت PDF از لینک زیر دانلود کنید :
مطالب مرتبط :
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید.
با سلام وتشکر از سایت پربازده شماما یه روبات تعقیب خط در ماده نوین یا همون رالی رو استارت زدیم اگ ممکنه در انتخاب موتور منو یاری کنین لطفا جواب رو برام ایمیل کنین باتشکر از مدیریت محترم سایت منتظرم
با سلام خدمت دوستان …. مطالب فوق برایم مفید واقع شد.
امیدوارم مطالب بیشتری در رابطه موتورهای step و D.C. و کنترل آنها از شما بیاموزم. ارادتمند…بهاروند