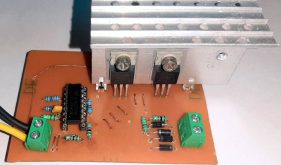
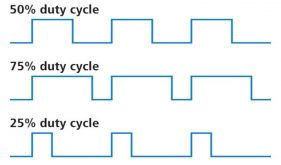
معکوس کننده (اینورتر) مداری است که جریان مستقیم (DC) را به جریان متناوب (AC) تبدیل میکند. اینورتر PWM نوعی از این مدارهاست که برای شبیهسازی تاثیرات جریان متناوب (AC)، از موج مربعی اصلاح شده استفاده میکند. به این ترتیب برای تغذیهرسانی به بسیاری از لوازم الکترونیکی خانگی مناسب است. اینکه …
Read More »مدار اینورتر PWM با استفاده از TL494