در موتورهای براش ( جاروبک دار ) برای رساندن جریان به روتور از قسمتی به نام جاروبک استفاده می شود، این در حالیست که با چرخش روتور قطب ها جابجا می شود و موتور به حرکت در می آید ، طی این جابجایی جاروبک ها باعث می شود موتور دارای عمر محدود ، اتصال معیوب جاروبک ها به کموتاتورها ( قسمتی که جاروبک برروی آن ها می لغزد ) ، حجیم بودن موتور وعامل ایجاد نویز باشد.
در موتور های براشلس با حذف جاروبک و کموتاتورها معایب را رفع کرده و به موتور با نسبت توان به حجم بیشتر ، نویز کمتر و عمر بیشتر دست یافته ایم ، همچنین سرعت عملکرد بیشتر و پاسخ دینامیکی بزرگتر از مزیت های دیگر BLDC ها می باشد.

محبوبیت موتور های براشلس روز افزون است ، زیرا جایگزینی جاروبک ها و کموتاتورها با یک کنترلر الکترونیکی باعث بهبود عملکرد و ارتباطش با دیگر دستگاه ها شده است .
BLDC موتور می تواند کوچکتر و با بازدهی بیشتری نسبت به نوع براش با توان خروجی یکسان ساخته شود و این خصوصیت مناسب مکان هایی است که فضای کمی برای حجم موتور موجود است .
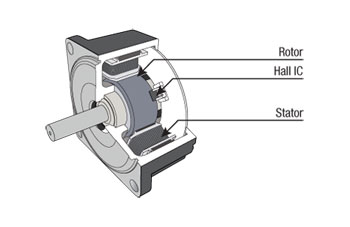
و چون در موتور های براشلس هیچ روابط الکتریکی یا مکانیکی بین استاتور و روتور وجود ندارد ، در نتیجه جابجایی قطب ها نیازمند پوزیشن وابسته قطعات به یکدیگر است تا موتور به آسانی قابل کنترل باشد .
کاربرد های موتور براشلس
از موتورهای براشلس به طور گسترده در لوازم خانگی ، خودرو ، هوافضا ، پزشکی ، تجهیزات و ماشین الات صنعتی خودکار و… استفاده می شود.
برای ساخت موتورهای براشلس از دو روش استفاده می شود:
با استفاده از سنسورهای اثر هال و یا با محاسبه ولتاژ برگشتی سیم پیچ ها ( back EMF )
در جلسه بعد روش استفاده از اثر هال توضیح داده خواهد شد .
مطالب بیشتر در مورد موتورهای الکتریکی
ساخت کوادکوپتر (موتورهای براشلس در ساخت کوادکوپتر ها هم استفاده میشود. )
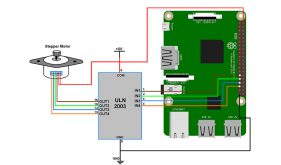
کنترل و درایو موتور براشلس یا BLDC
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید.
*********** محسن
موتور های براشلس یا بدون جاروبک