سروو موتور یا سروموتور (در هر دو شکل مینویسند ولی بنظرم سروو موتور خوانا تر است.) یک موتور الکتریکی ساده است که به کمک فرایند سروو مکانیزم کنترل می شود. اگر موتوری که تحت فرایند سروو مکانیزم قرار است کنترل شود از نوع موتور DC است، معمولا به آن سروو موتور DC گفته می شود و اگر موتور توسط برق AC تغذیه شود، به آن سروو موتور AC گفته می شود.
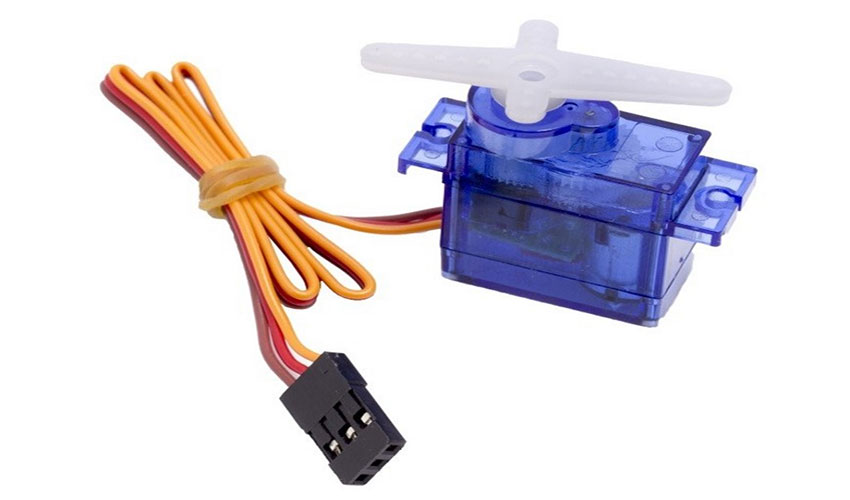
سروموتور یک موتور کوچک است که یک محور خارجی دارد. این محور توسط فرستادن سیگنال های مشخصی به موتور میتواند به جهت های زاویه دار معینی تغییر جهت دهد. تا زمانی که این سیگنال ها در ورودی موتور اعمال شود, موتور زاویه محور را نگه می دارد. اگر سیگنال ها تغییر کنند, زاویه محور تغییر میکند. در عمل از موتورهای سروو در هواپیما های کنترل شده با رادیو برای جهت دادن به سطوح کنترل مانند آسانسورها و سکان هواپیما استفاده میشود. همچنین از آنها در اتومبیل های کنترل شده با رادیو, عروسک ها و البته ربات ها استفاده میشود.
تئوری سروو موتور
در برخی از کاربردها برای موتورهای الکتریکی نیاز داریم که موتور فقط به اندازه زاویه مشخصی چرخش نماید. برای این کاربردها نیاز به موتوری داریم تا به ازای پالس های الکتریکی داده شده به آن، به اندازه مشخصی چرخش نماید. در این مواقع سروو موتور کاربرد خود را نشان می دهد.
سروو موتور معمولا یک موتور DC است که به منظور چرخش به میزان زاویه مشخصی به کمک فرایند سروومکانیزم (معمولا یک سیستم کنترل حلقه بسته) کنترل می شود. امروزه سروو موتورها در کاربردهای صنعتی بزرگی استفاده میشوند. سروو موتورها در ماشین های اسباب بازی کنترل از راه دور یا در دستگاه های پخش CD یا DVD نیز کاربرد دارند. به غیر از این موارد سروو موتورها صدها کاربرد دیگری نیز در وسایل و تجهیزات اطراف ما دارند.

ویژگی بسیار مهم سروو موتورها این است که دارای دقت زاویه ای بسیار بالایی هستند، به این معنا که با دادن پالس های الکتریکی به میزان دقیقی از زاویه چرخش می کنند و سپس متوقف می شوند تا پالس های بعدی داده شود. این عملکرد برخلاف موتورهای معمولی است که با دادن تغذیه به آنها بلافاصله شروع به چرخش میکنند و با قطع تغذیه نیز چرخش آنها متوقف می شود. در این موتورها ما هیچ کنترلی بر روی زاویه چرخش نداریم و فقط میتوانیم سرعت آن را کنترل کرده و آن را خاموش یا روشن نماییم. حالا میتوانیم بهتر و دقیق تر به این سوال پاسخ دهیم که سروو موتور دقیقا چه نوع موتوری است؟
سروو موتور دقیقا چه نوع موتوری است؟
سروو موتور نوعی از موتور است که به صورت خودکار طبق دستورات داده شده تا میزان دقیقی شروع به چرخش می نماید و به کمک فیدبک گرفتن از خروجی میتوانیم عملکرد آن را در محدوده مورد نظر تنظیم نماییم.
سروو موتورها و پالس
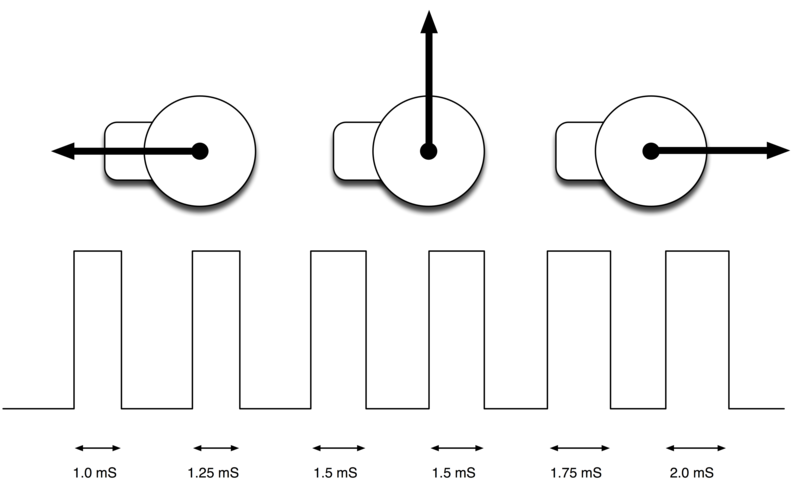
موقعیت شفت سروو موتور با طول پالس تعیین می شود. برای مثال موتوری با این مشخصات کار میکند: سروو باید تقریبا هر 20میلی ثانیه یک پالس دریافت کند. اگر این پالس برای 1 میلی ثانیه یک باشد در اینصورت زاویه شفت 0 درجه خواهد بود اگر این مدت 1.5 میلی ثانیه باشد سروو در موقعیت مرکزی قرار می گیرد و اگر 2 میلی ثانیه باشد زاویه سروو 180 درجه خواهد بود.
سیم کنترل برای این امر استفاده میشود. زاویه توسط طول مدت پالسی که به سیم کنترل اعمال میشود مشخص میشود. این پالس PCM یا مدولاسیون کد شده پالسی نامیده میشود(مشابه PWM). موتور انتظار دارد که هر 20میلی ثانیه یک پالس به آن اعمال شود. طول پالس معین میکند که موتور تا چه مسافتی گردش میکند. برای مثال یک پالس 1.5 میلی ثانیه ای باعث میشود موتور 90درجه گردش کند (که اغلب موقعیت خنثی نامیده میشود). اگر پالس کوتاه تر از 1.5میلی ثانیه باشد موتور محور را نزدیک به صفر درجه میچرخاند. اگر پالس بلند تر از 1.5 میلی ثانیه باشد, محور نزدیک به 180درجه میچرخد.
نقاط انتهایی سروو می توانند مختلف باشند و خیلی از سرووها تنها 170 درجه می چرخند . اما سرووهای ‘پیوسته’ نیز وجود دارند که می توانند تمامی 360 درجه را گردش کنند.
طرز کار یک موتور سروو
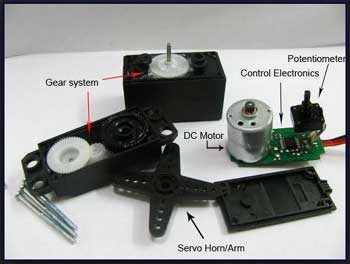
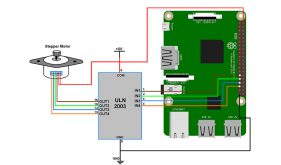
یک موتور سروو تعدادی مدارات کنترل و یک پتانسیومتر(مقاومتمتغیر) که به محور خارجی متصل است دارد. در تصویر بالا پتانسیومتر در سمت راست برد مدار مشاهده میشود. این پتانسیومتر به مدار اجازه ی کنترل زاویه و جهت جریان موتور را می دهد.
اگر محور در زاویه صحیح قرار داشته باشد , موتور متوقف میشود. اگر مدار متوجه شود که زاویه محور صحیح نیست, موتور را خواهد چرخاند تا در زاویه مطلوب قرار گیرد. محور خارجی موتور سروو قابلیت گردش 180 درجه را دارد. معمولا در بازه ی 210درجه قرار دارد اگرچه , بسته به سازنده تغییر میکند. یک موتور سروو نرمال برای کنترل زاویه 0 تا 180درجه استفاده میشود و به طور مکانیکی قابلیت چرخاندن محور دورتر را به دلیل دکمه ایست مکانیکی توکار در دنده اصلی خارجی را ندارد. توان اعمال شده به موتور متناسب با مسافتی که برای گردش نیاز دارداست. پس اگر محور به یک گردش زیاد نیاز دارد موتور با تمام سرعت کار خواهد کرد. اگر نیاز دارد که مقدار کمی گردش کند موتور با سرعت پایین تری کار خواهد کرد. این مسئله کنترل نسبی نام دارد.
مطالب تخصصی و کنترلی سروو موتور
این قسمت برای دوستان علاقمند به درس کنترل قرار داده شده و شاید برای دوستانی که این درس ها را پاس نکردن و یا اطلاعات چندانی ندادن خسته کننده باشه.
سروو مکانیزم
یک سیستم سروو عمدتا شامل سه بخش است :
- کنترل کننده
- سنسور خروجی
- سیستم فیدبک
به این سیستم، سیستم کنترل حلقه بسته گفته می شود. در اینجا به جای کنترل دستگاه توسط یک سیگنال متغیر ورودی، دستگاه را از طریق سیگنال حاصل شده از مقایسه فیدبک گرفتن از خروجی و سیگنال مرجع کنترل می کنیم.
زمانی که سیگنال مرجع یا فرمان به سیستم اعمال می شود، این سیگنال با سیگنال خروجی حاصل شده از سنسور مقایسه می شود و یک سیگنال سومی توسط سیستم فیدبک ایجاد می شود. این سیگنال به عنوان ورودی دستگاه عمل می کند. این سیگنال تا زمانی که یک اختلاف منطقی بین سیگنال خروجی حاصل شده از سنسور و سیگنال مرجع وجود دارد تولید می شود. زمانی که خروجی به مقدار مطلوب رسید، دیگر اختلافی بین سیگنال مرجع و سیگنال فیدبک گرفته شده از خروجی وجود نخواهد داشت. در نیتجه دیگر سیگنال سوم به مقدار کافی قدرت ندارد تا بتواند خروجی دستگاه را تحت تاثیر قرار بدهد و تغییراتی در خروجی دستگاه ایجاد نماید. در نتیجه وظیفه اصلی یک سیستم سروومکانیزم تثبیت خروجی دستگاه در مقدار مطلوب در زمانی که اغتشاش نیز وجود دارد است.
اصول عملکرد سروو موتور
سروو موتور معمولا شامل یک موتور DC است (در برخی موارد ممکن است AC باشد) به همراه تعدادی قطعه دیگر که با یکدیگر یک سروو موتور را تشکیل می دهند. معمولا درون یک دستگاه سروو موتور یک موتور DC کوچک، یک پتانسیومتر، مجموعه چرخ دهنده و یک مدار کنترل کننده وجود دارد. به کمک مدار کنترل به همراه پتانسیومتر میتوانیم زاویه چرخش موتور را کنترل نماییم. همان طور که میدانیم یک موتور کوچک با سرعت زیادی می چرخد اما گشتاور آن به منظور چرخش حتی یک بار سبک نیز کافی نیست.
در اینجا نقش چرخ دهنده ها پر رنگ می شود. چرخ دهنده ها سرعت بالای موتور را در ورودی دریافت کرده و در خروجی سرعت پایین تر اما پشتاور بالاتری را ارائه می دهد. در موقعیت اولیه محور سروو موتور، موقعیت پتانسیومتر به شکلی است که هیچ سیگنال الکتریکی در پورت خروجی پتانسیومتر ایجاد نمی شود. این پورت خروجی پتانسیومتر به یکی از پایه های ورودی تقویت کننده آشکارساز خطا متصل می شود. همچنین به پایه دیگر این تقویت کننده یک سیگنال خارجی متصل می شود. حال سیگنال ایجاد شده در اثر اختلاف میان سیگنال خروجی پتانسیومتر و منبع خارجی تقویت شده و به موتور DC داده می شود.
این سیگنال تقویت شده به عنوان توان ورودی به موتور DC اعمال شده و موتور در جهت دلخواه شروع به چرخش می نماید. همزمان با چرخش محور موتور، میله پتانسیومتر نیز به کمک چرخ دهنده ها شروع به چرخش می نمایند. با تغییر موقعیت میله پتانسیومتر همزمان یک سیگنال در پورت خروجی پتانسیومتر ایجاد می شود، با چرخش بیشتر میله پتانسیومتر، سیگنال ایجاد شده در خروجی پتانسیومتر افزایش می یابد. با قرار گیری موتور در موقعیت مورد نظر، میله پتانسیومتر نیز به همان مکان می رسد و سیگنال خروجی تولید شده توسط پتانسیومتر با سیگنال منبع خارجی که به تقویت کننده داده شده است برابر می شود. به دلیل این که اختلافی بین سیگنال منبع خارجی و سیگنال تولید شده توسط پتانسیومتر وجود ندارد، سیگنال تولید شده و اعمال شده به موتور نیز برابر با صفر می شود. از آنجایی که سیگنال اعمال شده به موتور برابر صفر است، موتور متوقف می شود. این موارد اصول عملکرد یک سروو موتور را تشریح می نماید.
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید و همچنین میتوانید اپلیکیشن اندرویدی آموزش الکترونیک را هم نصب کنید.
عالی بود
مرسی از زحمات ارزندتون.