موتور سه فاز براشلس سه فاز بوسیله سنسور اثر هال
موتورهای سه فاز براشلس برای تعیین موقعیت روتور به سه سنسور اثر هال نیاز دارند بر اساس موقعیت فیزیمی سنسور های اثر هال دو تیپ خروجی وجود دارد پرش 60 درجه ای فاز و پرش 120 درجه فاز ترکیب این سه سنسور هال می تواند سکانس های اضافی مربوطه را تعیین کند
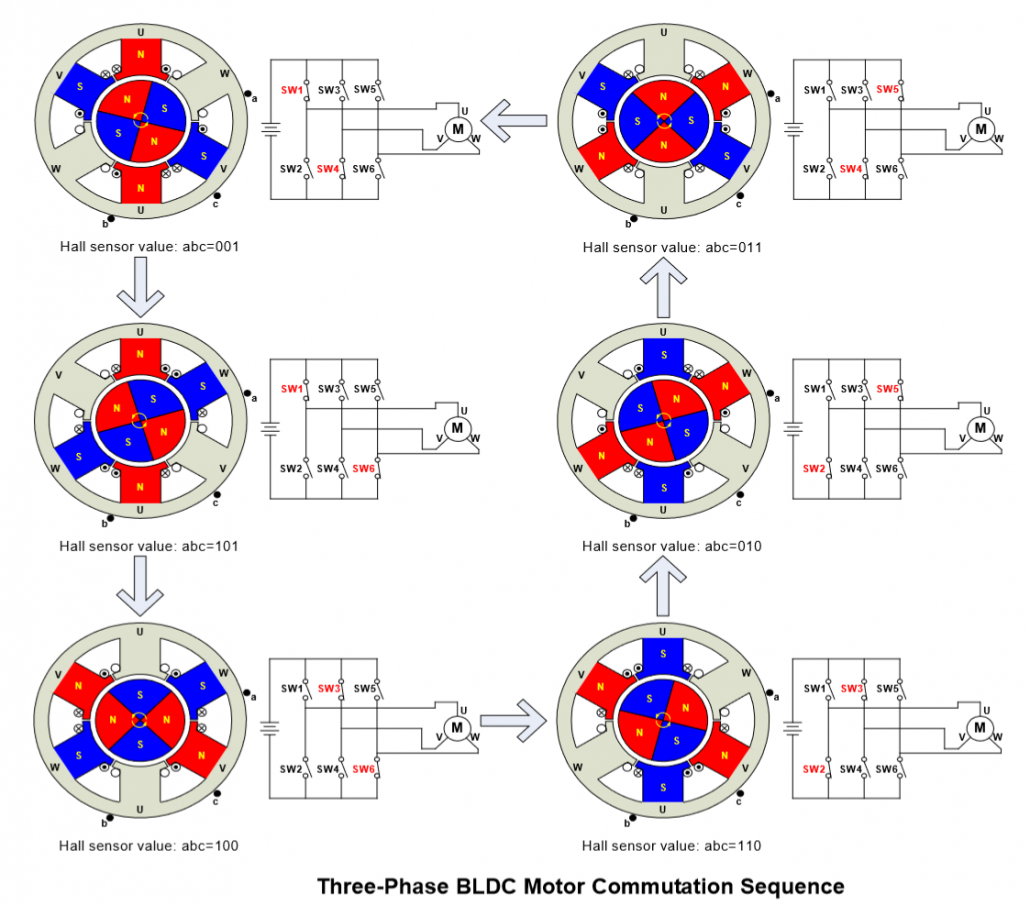
شکل زیر سکانس های متغیر مدار درایور موتور براشلس سه فاز که به طور پاد ساعتگرد در حال چرخش است را نشان می دهد سه سنسور هال a b و c به فواصل 120 درجه روی استاتور قرار داده شده اند به طوریکه سه فاز ( سیم پیچ ها ) به حالت ستاره (Y) به یکدیگر متصل شده اند برای هر دوران 60 درجه یکی از سنسورهای هال تغییر سطح ولتاژ می دهد یک سیکل کامل دارای 6 مرحله می باشد به طور هماهنگ هر 60 درجه سوئیچ جریان فاز با توجه به موقعیت تغییر می کند برای هر مرحله یکی از پایه ها در ولتاژ HIGH و یکی در LOW و سومی به حالت معلق متمایل به LOW قرار دارد
کنترل درایور های منحصر به فرد هر درایور HIGH و LOW باعث درایو LOW و درایو HIGH و درایو شناور در هر پایه موتور می باشد با این حال ممکن است یک سیکل سیگنال مطابق یک دور کامل مکانیکی موتور نباشد بنابراین تعداد سیکل سیگنال برابر تعداد جفت قطب های روتور می باشد

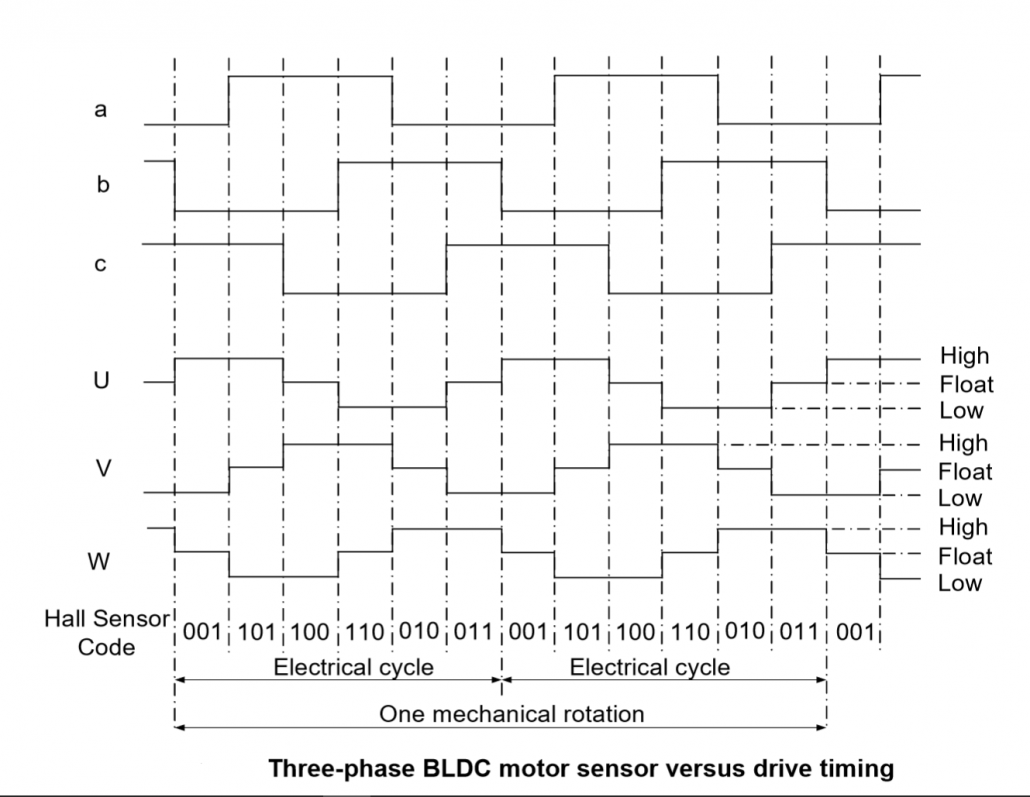
شکل زیر دیاگرام زمانی که سه سیم پیچ U V W ( دوتا دارای انرژی و یکی شناور بر اساس سیگنال سنسور هال a b c ) را نشان میدهد . این یک نمونه از سیگنال سنسور هال دارای شیفت فازی 120 درجه نسبت به هم برای چرخش پادساعتگرد موتور می باشد ایجاد یک موتور ساعتگرد یا با شیفت فازی 60 درجه سنسورهای هال نیازمند سکانس های زمانی متفاوتی هست برای سرعت متفاوت از سیگنال PWM روی سوئیچ ها با فرکانس خیلی بالاتر از فرکانس چرخش موتور استفاده می کنیم معمولا باید فرکانس PWM حداقل 10 برابر بیشتر از بیشترین حد فرکانس چرخش موتور باشد
مزیت دیگر PWM این است که اگر ولتاژ گذرگاه DC خیلی بیشتر از ولتاژ مجاز موتور باشد می توان با تعیین حدود چرخه کار PWM موتور را با ولتاژ مجاز خودش کنترل کرد
مبحث بعدی در مورد موتور های براشلس بدون سنسور می باشد که در جلسه بعدی توضیح خواهیم داد…
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید و همچنین میتوانید اپلیکیشن اندرویدی آموزش الکترونیک را هم نصب کنید.
سلام
از اطلاعات شما ممنون
یک سوال داشتم من یک درایور برای موتور براشلس120 کیلو وات
دارم به محض استارت در بی باری موتور دور بالا و حریان زیاد و نهایت بعد از 5 ثانیه خطای اور کارنت میدهد
می خواستم علت این اتفاق را بدونم
ممنون
سلام، تا جایی که من متوجه میشم احتمالا قسمت کنترل جریال ( کلا کنترل موتور) به مشکل برخورده. یا اینکه ست_پوینت ها باهم نمیخونن، مثلا شما توی برنامه ست کردین دورش 1200 باشه و برای رسیدن به این دور به 10 آمپر جریان نیازه ولی در حقیقت این درایور شما توانایی این جریان دهی را نداره یا ست شده خطا بده…
سلام. جناب من یه موتور دارم که ۹ ، ۸ تا سیم داره ، چند نفر بخاطر سیمهاش گفتن استپر موتوره! اما من قبول نکردم و بازش کردم ! یه سیم سیمپیچ چند پایه هست مثلا ۱۲ پایه و خود بدنه موتور آهنربای دایرهایه ، با سه تا سنسور هال . یعنی ساختار کاملا موتور براشلسه ، فقط من نمیدونم اون سیمهاش برای چیه؟ ممنون میشم راهنمایی کنید.
باعرض سلام وخسته نباشید سوال بنده این است آیا موتور سه فاز براشلس سنسور اثر هال طریقه نصب و چند تا سیم باید نصب کرد آیا این موتور ها با دور بالا کار می کنند ودر ضمن موتور براشلس تکفاز چند تا سیم نصب می شود چون ما خرید موتور تک فاز براشلس کردیم چند تا سیم برای نصبش .کابل سه رشته لازم است یا کابل دو رشته ممنون از راهنماییتون متشکر