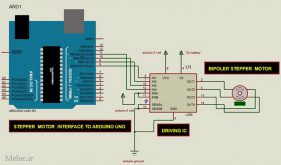
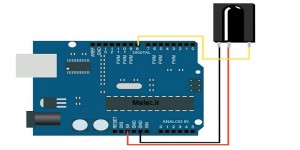
در این پروژه هدفمون راه اندازی موتور پله ای با آردوینو است. حالا ببینیم موتورهای پله ای به چه نوع موتورهای الکتریکی گفته میشود. موتور پله ای یا استپر موتور یک موتور بدون جاروبک است که یک چرخش کامل (360 درجه) را به تعدادی پله تقسیم می کند. موتور پله ای با …
Read More »راه اندازی موتور پله ای با آردوینو