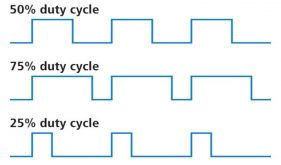
در این جلسه به آموزش کنترل موتور DC با آردوینو میپردازیم. نگاه کلیای به تکنولوژیهای اساسی جهت کنترل موتور DC خواهیم داشت و سپس دو مثال میزنیم که از طریق آنها کنترل موتور DC با استفاده از درایور L298N و بُرد آردوینو شرح داده میشود. کنترل PWM موتور DC PWM …
ادامه نوشته »آموزش کنترل موتور DC با آردوینو