آموزش ساخت کوادکوپتر
دراین مقاله به آموزش ساخت کوادکوپتر یا ربات پروازی می پردازیم قبل از شروع ساخت به یاد گیری تعاریف اولیه از جمله کوادکوپتر چیست؟هلی شات چیست ؟ پهباد چیست؟ می پردازیم.

بخش های کلی آموزش ساخت کوادکوپتر
- کوادکوپتر چیست ؟
- کوادکوپتر چگونه پرواز میکند؟
- معرفی قطعات استفاده شده در یک کوادکوپتر.
- فیلم آموزش ساخت کوادکوپتر
پهباد چیست؟
چون کواد کوپترها جز دسته پهباد ها هستند قبل از همه چیز به تعریف دقیق پهباد می پردازیم. به نقل از ویکی پدیا پهباد یا پرنده هدایت پذیر از دور که به ان وسیله هوایی بدون سر نشین نیز گفته می شود نوعی وسیله کنترل شونده از راه دور است.
ارزش صنعت پهبادها در سال 2020 مبلغ 127 میلیارد دلار پیش بینی می شود.

کنترل پهباد : پهباد ها یا به وسیله کنترل از راه دور یا با برنامه های پیش پروازی ریخته شده از قبل یا با سامانه های توکار دینامیک هدایت می شوند.
کاربرد پهباد ها و کوادکوپترها
- اسکن مکانها و داخل ساختمان ها با سنورهایی مانند kenect
- پرواز به جاهایی که فرستادن خلبان خطرناک است
- برسی مکان های خطرناک قبل از رفتن انسان
- امداد و نجات در داخل ساختمان
- خاموش کردن اتش سوزی
- هواشناسی و جغرافیایی
- در زمینه مخابرات
- ناوبری جهانی
- فیلم برداری
- تحویل کالا
- جاسوسی
- عکاسی
نوشته مرتبط : کوادکوپتر های شگفت انگیز-کوادکوپتر هایی که مانند ورزشکاران فکر می کنند
کوادکوپتر چیست؟
همانطور که در بالا گفتیم کوادکوپتر یا کوادروتر یکی از انواع پهباد ها است. به دلیل کمک گرفتن از چهار پروانه به عنوان کواد(چهار)کوپتر شناخته می شوند.
کوادکوتر ها به دلیل داشتن قدرت مانور فوق العاده ، پروازهایی با با تعادل بالا و ابعاد کوچک کاربردهای زیادی دارند. هر روز شاهد توسعه یا ابداع بک کوادکوپتر با کاربرد جدید توسط دانش آموزان ، دانشجویان ، مراکز تحقیقاتی و نظامی و تجاری هستیم.
اصول عملکرد کوادکوپتر
بیایید کمی علمی صحبت کنیم کوادکوپترها از ایجاد اختلاف فشار در اتمسفر پیرامون خود برای پرواز استفاده میکنند. به عملکرد هلی کوپتر دقت کردین ؟
کوادکوپترها با دارا بودن 4 موتور و پره ، و چرخش دو به دو معکوس این موتور ها ، نیروهای گشتاور ایجاد شده را خنثا و اختلاف فشار لازم جهت پرواز را ایجاد میکند.
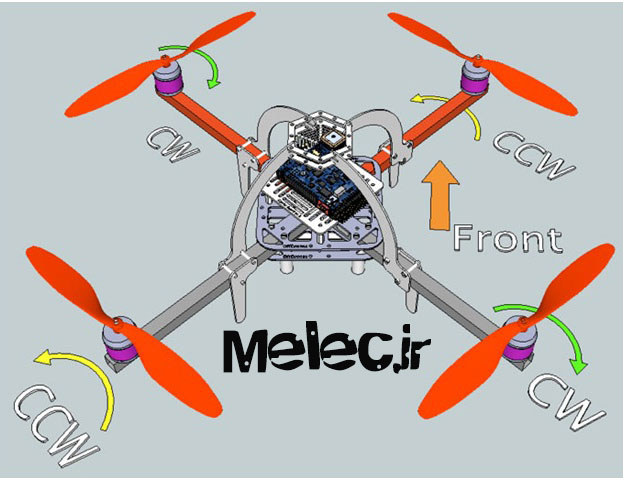
اگر بحث علمی برایتان جذاب نبود بطور خلاصه بصورت شکل بالا توضیح دهیم که کوادکوپتر یک هلی کوپتر با 4 ملخ هست. چرخش دو به دو مخ ها باعث به پرواز درآمدن کوادکوپتر می شود.
و البته با کم و زیاد کردن سرعت موتورها و یا حتی خاموش کردن موتور ها میتوانیم حرکات نمایشی و حرکتی نیز انجام دهیم.
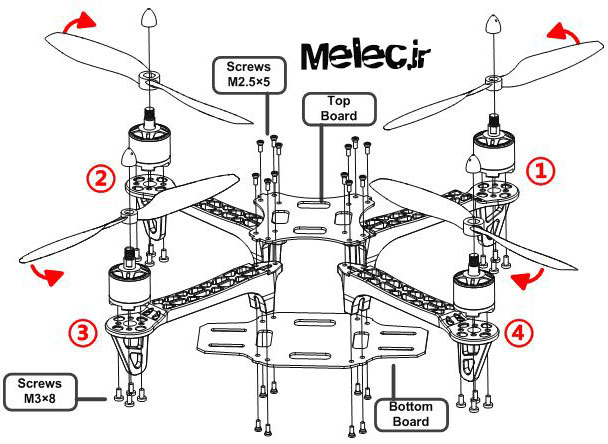
لیست قطعات لازم برای ساخت کوادکوپتر

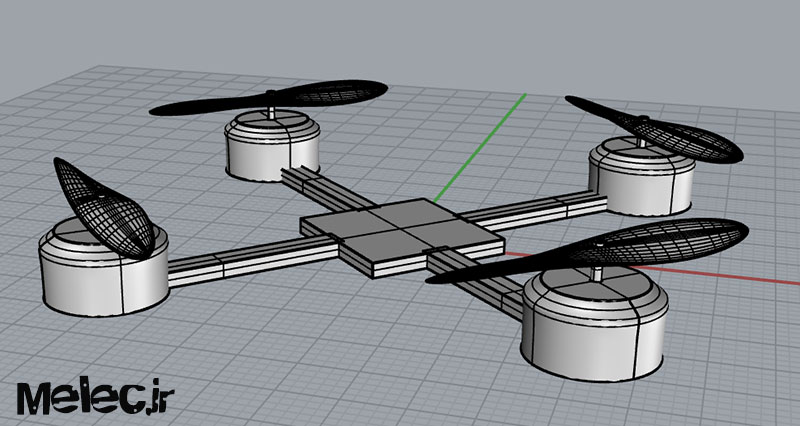
بدنه یا ایرفریم
به بدنه کواد ایرفریم می گویند بدنه باید سبک و مقاوم باشد. در ربات هایی که تعادل دقیق ، حساس و مهم هست بدنه باید با دقت بیشتری ساخته شود. تا تعادل سیستم را به هم نزند.
اکثر بدنه ها از پلاستیک سخت،فیبرکربن و یا آلومنیوم ساخته می شوند. البته بهترین نوع بدنه از نوع فیبر کربن می باشد. علت استفاده زیاد از بدنه فیبرکربن در کوادهای حرفه ای این است که فیبرکربن هم مقاوم و هم وزن کمتری دارد.

ایرفریم معمولا از صفحه مرکزی ، بازوها و پایه فرود تشکیل شده. و همچنین کل سیستم روی بدنه نصب می شود و بدنه باید همه ی وزن موتورها و… را تحمل کند.
پیکربندی ایرفریم بصورت x و +
کوادکوپترها بر اساس بدنه و دماغه بدنه به دو نوع + و x تقسیم می شوند.

شما همچنین میتوانید فریم خودتان را طراحی و با پرینتر سه بعدی چاپ کنید. و یا خودتان با چوب یا ابزار های سبک و محکم بسازید. ایرفریم های آماده بسیاری در بازار هستن که متناسب با کوادی که میخواهید بسازید میتوانید انتخاب کنید. یک ایرفریم خوب میتواند تا حد زیادی از آسیب رسیدن به دیگر قطعات در هنگام کرش جلوگیری کند.
بعضی از ایرفریم ها امکان جمع شدن بازوها و پایه های فرود نیز دارند و همگام پرواز پایه ها جمع می شوند. و البته جنس بسیار خوبی هم د ارند و در کش های ساده نمی شکنند.
بعضی بدنه ها بصورت کیت هستن و حتی بعضی بدنه ها روی PCB طراحی شدن و دارای برد های تقسیم ولتاژ نیز هستن. البته ناگفته نماند که صفحه های کربنی در ابعاد مختلف به فروش می رسند که خودتان میتوانید با اره ببرید و بدنه خودتان را بسازید. بعضی از ایرفریم ها دارای لرزش گیر هستن و بعضی ها نیستن و میتوانید جداگانه تهیه و روی آن نصب کنید.
موتور براشلس
پیشرانه کوادکوپتر 4 عدد موتور براشلس هستن ، موتورهایی با تعداد دور (RPM) بالا هستن.راه اندازی موتورهای براشلس متفاوت تر از موتورهای DC است. به همین دلیل معمولا از بردهای کمکی (ماژول) بنام اسپید کنترلر استفاده می شود. این موتورها دارای 3 سیم هستن و یک موتور براشلس کوچک ممکن است بیست آمپر جریان بکشد.
نکته : موتورهای کورلس برای کوادکوپتر های کوچک و ارزان قیمت استفاده می شود.

پیچ مهره های خاصی برای بستن موتور روی برد و بستن پروانه ها یا ملخ ها روی براشلس نیاز است که هنگام خرید موتورها این پیچ و مهره ها را نیز تهیه کنید.
اسپید کنترلر
همانطور که از نام آن پیداست وظیفه کنترلر سرعت موتورها را به عهده دارد. اسپید کنترلر باید متناسب دیگر قطعات و به خصوص موتورها انتخاب شود.
مقاله مرتبط: کنترل و درایو موتور براشلس یا BLDC
اسپیدکنترلرها سه نوع سیم دارند. دسته اول سیم های تغذیه است.دسته دوم سیم های ورودی سیگنال از برد فلایت کنترلر پرواز هستند. دسته سوم سیم های خروجی پالس ها هستن و مستقیم به موتورها وصل می شوند.

اسپید کنترلر یا ESC مخفف Electronic Speed Controller است.
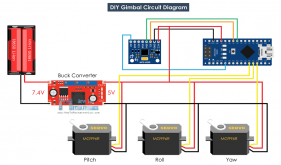
فلایت کنترلر
فلایت کنترلر یا کنترل کننده پرواز وظیفه کنترل پرواز ، تعادل و پایداری کواد را بر عهده دارد. این برد با دستور به اسپید کنترلرها ، جهت ، سرعت و پایداری کواد را کنترل می کند.
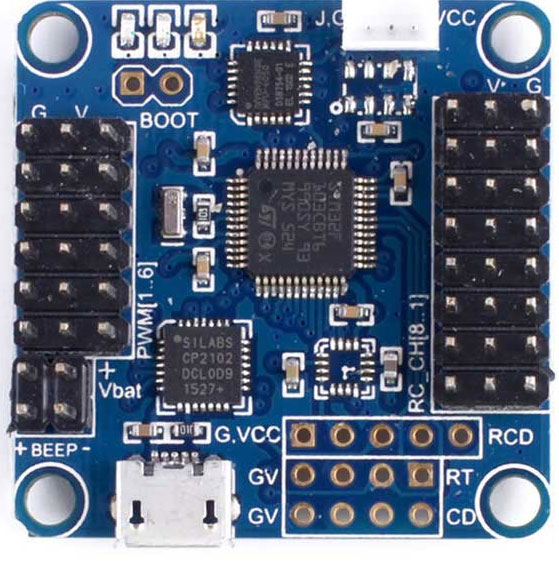
سنسورهای مختلفی از ژیروسکوپ ، شتاب سنج ، بارومتر و قطب نما در این برد ها هستن و یا میتوانیم بصورت ماژول به فلایت کنترلر اضافه کنیم. همچنین ماژول هایی مانند GPS را نیز میتوانیم به فلایت اضافه کنیم. پایداری و تعادل به این سنسور ها وابسته است.
در بعضی از فلایت کنترلرها قابلیت هایی مانند خلبان خودکار ، بازگشت به خانه ، فرود خودکار و رفتن از نقطه A به نطقه B وجود دارد.
فلایت کنترلرهای اپن سورس از قبیل APM و PIXHAWK
فلایت کنترلرهای تجاری مانند DJI , XA , ZERO
رادیو کنترلر
برای کنترل ربات و جهت دهی به حرکت کواد از راه دور به یک رادیو کنترلر نیاز داریم. رادیو کنترلرها در تعداد کانال های متفاوت در بازار هستند و با توجه به کوادکوپتر خود میتوانید نوع مناسبی را انتخاب کنید.

باتری
با توجه به اینکه دور موتورهای براشلس بالاست در نتیجه جریال مصرفی بالایی نیز دارند. معمولا صحبت از 10 آمپر به بالا میشود. و چون 4 تا موتور داریم باید این جریان را به 4 ضرب کنیم. باتری های لیتیوم پیلیمری ظرفیت بالا با قابلیت جریان دهی بیش از جریان نامی دارند.
مثلا روی باتری لیتیوم پلیمری نوشته 3000mA 20C یعنی این باتری قابلیت جریان دهی تا 20 برابر جریان نامی خود دارد.
یکی از قطعات مهم و گران قیمت کواد باتری است. مدت زمان پرواز کواد بستگی به باتری دارد. با افزایش ظرفیت باتری وزن کوادکوپتر نیز افزایش پیدا میکند.
شارژر باتری
استفاده از یک شارژر باتری استاندارد در عملکرد و طول عمر باتری تاثیر خواهد داشت. برای همین توصیه می وشد از شارژر مخصوص که با روش خاصی شارژ می کند ، استفاده شود.
در ضمن از هشدار دهنده باتری برای مراقبت از باتری و آگاهی از خالی شدن آن استفاده می شود.
مطلب مرتبط: انواع باتری ها و روش های شارژ آنها
ملخ یا پروانه
برای کوادکوپتر 4 عدد ملخ نیاز است که دوتای آن پوشر یا دمنده و دوتای آن پولر یا مکنده هستن. دوتا ملخ در یک جهت و دوتای دیگر در جهت دیگر می چرخند.

برد تغذیه و توزیع برق
این برد برای تامین تغذیه قسمت های مختلف کواد به کار میرود.
برای بهم وصل کردن قطعات و سیم کشی از قطعات اضافی مانند گلد کانکتور ، T کانکتور و…. میتوانید استفاده کنید.
قطعات و ماژول های کاربردی دیگر کوادها
ماژول GPS ، فرستنده و گیرنده تصویر ، دوربین ، گیم بال ، استابلایزر، سایبان دوربین ، پایه GPS ، و… را نیز میتوانید نسبت به نیازتان به کواد اضافه کنید.
کیت های کامل کوادکوپتر در بازار موجود هستند و میتوانید با تهیه این کیت ها در مدت خیلی کوتاه یک کواد را بسازید و آن را نسبت به کاربرد دلخواهتان شخصضی سازی کنید.
فیلم آموزش ساخت کوادکوپتر
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید و همچنین میتوانید اپلیکیشن اندرویدی آموزش الکترونیک را هم نصب کنید.

چرا وقتی هنوز نمیدونید پهپاد درسته نه پهباد مطلب آموزشی مینویسید؟
سلام، عذرخواهی میکنم. انشاالله در آینده بیشتر مطالعه میکنیم قبل از انتشار مطالب. موفق باشید.
کلمه درست پهپاد هست نه پهباد. سر واژه ی پرنده هدایت پذیر ازراه دور
برعکس پهباد درسته نه پهپاد
سلام و خسته نباشید بابت مقاله خوبتون؛ میخواستم بدونم در تهران بهتره از کدوم نمایندگی فروش کوادکوپتر خرید کنیم؟! نمایندگی های سایما آرسی محصولاتشون رو با تخفیف برای فروش گذاشتن شما تائید میکنید؟!
وای خیلی باحال بود
سلام من میخام یه کواد کوپتر بسازم کل هزینه با خودم کسی کامل بلد هست بامن همکاری کنه م 091****339
سلام، عزیز اگر علاقمند بودی در لینک زیر ثبت کن.
https://melec.ir/post-a-job
سلام خیلی عالی بود
من یک سوال داشتم
پهباد من ۲۰۰ گرم است با ابعاد ۱۴.۵ در ۱۴.۵ سانتی متر
با موتور های کورلس و باتری ۸۰۰ میلی امپر ۲۵ c اما پرواز نمی کند
چی کار کنم
به نظر شما از گیربکس استفاده کنم برای چرخواندن پره بزرگ تر
سلام خسته نباشید ببخشید اگر بتونیم یه کواد کوپتر حرفه ای بسازیم احتمالش هست برخی شرکتها این خریداری کنن؟
سلام، بله.
اگر یک کوادکپتر جدید و خلاقانه بسازید صد در صد خریدار خواهد داشت. حتی اگر خیلی خلاقانه باشه میتونید پتنت اون را ثبت کنید و بفروشید به شرکتها. قبل از همه چیز بگردید ببینید چه نوع کوادکوپترهایی تا الان در دنیا و ایران ساخته شدن. موفق باشید
سلام بنده مدیر تیم تحقیقاتی و ساختاری ساخت پهپاد در کشور ایران هستم ، اگه به کارتون ایمان دارین خوشحال میشم باشما همکاری کنم 09179916804
سلام ببخشید باید وسایل مورد نیازش از کجا تهیه کرد بعد حدودا چقد هزینه در میاد یک نفر تنها خودش کار کنه؟
سلام، در مورد هزینه هیچ نظری ندارم واقعا ولی در تو لینک زیر یکسری فروشگاه هست بعضی قطعات را میتونید تهیه کنید ازشون.
https://melec.ir/%d9%81%d8%b1%d9%88%d8%b4%da%af%d8%a7%d9%87%e2%80%8c-%d8%a7%db%8c%d9%86%d8%aa%d8%b1%d9%86%d8%aa%db%8c-%d9%82%d8%b7%d8%b9%d8%a7%d8%aa-%d8%a7%d9%84%da%a9%d8%aa%d8%b1%d9%88%d9%86%db%8c%da%a9/
سلام من از پهباد هایی که با موتور کورلکس و براشلس ساخته میشوند سر در میارم ولی چون قطعات رو نمی توانم تنهایی خریداری کنم نتونستم یک پهباد بسازم اگر کسی خواست پهباد بسازه میتونه بیاد باهم بسازیم راستی من از ربات های مسیریاب ونوریاب و جنگجو و …
هم سر در میارم
سلام ، آیدی تلگرامتونو برام بنویسید
سلام ایمیلتون رو بفرستید باهاتون هماهنگ کنم
سلام من آماده همکاری هستم
خیلی جالب بود
به وب سایت ماهم سری بزنید .
https://www.goproland.ir
سلام.وقت بخیر..بنده به دنبال ایجاد و راه اندازی کارگاه ساخت پهپاد هستم از متخصصین این امر دعوت به همکاری میکنم اگر شخصی به آموزش صفرتاصد ساخت پهپاد تسلط داره با بنده تماس بگیره ۰۹۱۲۴۶۶۰۹۶۳ حاتمی هستم..
سلام کسی هست که در ساخت کواد کوپتر یا هواپیمای کنترلی بتونه برام یه طرح رو جمع کنه .که از نظر رفتن از نقطه aبهb یا پرواز خودکار از طریق جی پی اس رفتن به مقصد رو انجام بده لطفا با ایدی تلگرامم پیام بده
Tali6284@
سلام من میخوام قطعات بخرم و خودم مونتاژ کنم و بفروشم کسی میتونه کمکم کنه؟ 09910142172
چطوری میتونم نقشه ساخت پهباد رو از شما تهیه کنم
سلام م تشکراز مقاله خوبتون.. فقط من از کجا قطعات پهپهادو بخرم خواهشا کمک کنید
پهپاد درست هست
سلام بعضی ها خیلی ضعیف هستن که فقط می خوان ایراد املایی بگیرن
مرد حساب یاد بگیر … مسل مگث روی ذخم میشینی این تن بز رگ ثالم رو ندیدی فقت زخم یافتی
بیاییم هم فکر و هم کار باشیم نه دل سرد کن
امید. آرم که همه شما ایراد گیرا ای ایراداتون بر طرف شه