استفاده از مقاومت های Pull-up در مدارات میکروکنترلری بسیار رایج است و شاید شما هم از این مقاومت ها در مدارات خود استفاده می کنید. در این پست نگاهی تخصصی تر به دلایل استفاده از این مقاومت ها و نحوه ی محاسبه آنها می اندازیم. بیشترین کاربرد این مقاومت ها در زمانی است که پایه ای از میکروکنترلر به عنوان ورودی تعریف شود، در این حالت اگر این پایه به تغذیه یا زمین متصل نباشد، اگر مقدار این پایه را در برنامه بخوانیم، این پایه چه مقداری خواهد داشت؟ یک یا صفر؟
به این حالت اصطلاحا حالت float یا شناور می گویند و و نمیتوان در مورد وضعیت منظقی پایه در این حالت اظهار نظر قطعی کرد، یعنی ممکن است پایه در وضعیت یک منطقی باشد یا صفر . علاوه بر عدم مشخص بودن وضعیت منطقی یک پایه در این حالت، امکان ورود نویز به مدارات داخلی میکروکنترلر نیز از این طریق وجود دارد. برای جلوگیری از این شرایط از مقاومت های Pull-up یا بالاکش یا مقاومت های Pull-down یا پایین کش استفاده می شود. مقاومت های بالاکش بین تغذیه مدار و پایه میکروکنترلر وصل می شوند و مقاومت های پایین کش بین پایه میکروکنترلر و زمین وصل می شوند. با وجود شباهت هر دو، استفاده از مقاومت های بالاکش در مدارات رایج تر است.
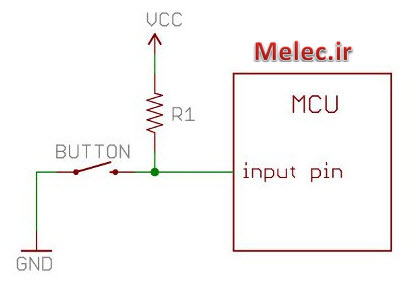
در شکل بالا، در حالتی که کلید در وضعیت باز قرار دارد، جریان کمی (با توجه به مقاومت ورودی پایه میکروکنترلر) از مقاومت به درون پایه میکروکنترلر وارد می شود و وضعیت منطقی این پایه در حالت یک قرار می گیرد. با فشرده شدن کلید، جریان مقاومت از طریق کلید به زمین منتقل می شود و وضعیت منطقی پایه در حالت صفر قرار می گیرد.

- نکته 1 : از مقاومت برای جلوگیری از اتصال کوتاه شدن تغذیه به زمین هنگام متصل وصل شدن کلید استفاده می شود، در غیر اینصورت میتوان پایه میکروکنترلر را مستقیما به تغذیه متصل نمود.
- نکته 2 : استفاده از مقاومت بالاکش به دلیل افزایش جریان، مقدار توان مصرفی مدار را کمی افزایش می دهند.
- نکته 3 : معمولا در میکروکنترلرها مقاومت بالاکش در همه ی پایه ها یا برخی پایه ها به صورت داخلی قرار داده شده است و با نوشتن مقدار مناسب در رجیسترهای مربوطه، در وضعیتی که پایه به عنوان ورودی تعریف شده است، این مقاومت بالاکش فعال می شود. در برخی کاربردها لازم است علاوه بر مقاومت بالاکش داخلی، برای افزایش مصونیت پایه های میکروکنترلر در برابر نویزهای محیطی، مقاومت بالاکش به صورت خارجی نیز قرار داده شود.
محاسبه مقدار مقاومت بالاکش
برای محاسبه مقدار مقاومت بالاکش باید دو نکته را مد نظر قرار داد :
- زمانی که کلید فشرده می شود، مقاومت میزان جریان کشی از منبع تغذیه را با توجه به قرار گیری ولتاژ تغذیه در دو سر آن تعیین می کند.
- در زمان باز بودن کلید، مقاومت بالاکش ولتاژ روی پایه میکروکنترلر را تعیین می کند.
با در نظر گرفتن مورد اول، استفاده از مقاومت های کوچک با توجه به افزایش جریان و توان مصرفی مطلوب نیست و باید سعی شود از مقاومت های بزرگ استفاده شود. اما افزایش مقدار مقاومت نباید با مورد دوم تضاد پیدا کند.
طبق مورد دوم، مقاومت نباید آنقدر بزرگ باشد تا ولتاژ مورد نیاز برای پایه ی میکروکنترلر برای تشخیص سطح منطقی یک کافی نباشد. در واقع با توجه به شکل زیر، در ورودی پایه میکروکنترلر یک مقاومت با مقدار 100K اهم تا 1M اهم وجود دارد (R2) که ولتاژ تغذیه بر روی این دو مقاومت تقسیم می شود. اگر مقدار مقاومت بالاکش (R1) بزرگتر از حد مجاز باشد، ولتاژ روی پایه میکروکنترلر طبق رابطه تقسیم ولتاژ کمتر از حد مورد نیاز میکروکنترلر برای تشخیص سطح منطقی یک می شود و عملا وضعیت پایه مشابه حالت شناور می شود.
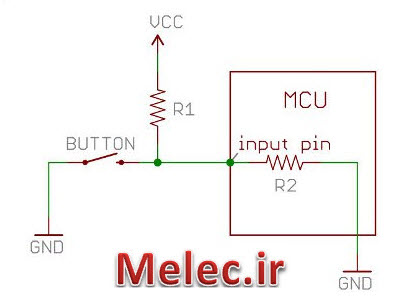
معمولا برای رعایت این نکته باید سعی شود که مقاومت بالاکش برای ایجاد سطح ولتاژ کافی برای ورودی از 1/10 مقاومت ورودی پایه میکروکنترلر (R2) بزرگتر نباشد.علاوه ملاحظات بالا، از آنجایی که مدار متصل شده به پایه ورودی میکروکنترلر معمولا دارای ظرفیت خازنی می باشد، این خازن با مقاومت بالاکش تشکیل یک فیلتر RC داده و همان طور که می دانیم در حالت تحلیل در حوزه زمان، مدت زمانی طول می کشد تا خازن به طور کامل شارژ و دشارژ شود و این مدت زمان با افزایش مقدار مقاومت، افزایش پیدا خواهد کرد، این مسئله باعش کاهش سرعت پاسخ میکروکنترلر به تغییر در ورودی ها می شود. به همین دلیل در ارتباط USB معمولا از مقاومت های بالاکش 1K اهم تا حداکثر 4.7K اهم استفاده می شود.
مقدار مقاومت بالاکش برای جریانی مشخص طبق قانون اهم، از تقسیم ولتاژ تغذیه بر جریانی که می خواهیم از تغذیه کشیده شود (هنگام اتصال کلید) به دست می آید. به عنوان مثال با در نظر گرفتن تغذیه 5v و جریان 1mA:

منبع :learn.sparkfun.com
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید و همچنین میتوانید اپلیکیشن اندرویدی آموزش الکترونیک را هم نصب کنید.

مطلبتون زیبا و آموزنده بود .سپاسگزارم.