پروژه زاویه سنج با انکودر ( کنترل حرکت استپ موتور )
با پیشرفت روز افزون علم و فناوری همواره نیاز های جدید به وسایل و دستگاه های جدید تر جهت هماهنگی همه بخشهای صنعت با این پیشرفت ، به وجود می آیند. بدین منظور شناخت و طراحی راه کارها و وسایل جدید امری است اجتناب ناپذیر.از جمله این پیشرفت ها ساخت نوع جدید و پیشرفته تری از موتورهای الکتریکی به نام استپ موتور ها یا موتورهای پله ای است که با کاهش انواع هزینه ها در صنایع کم کم جای مکانیزم های پیچیده مکانیکی را خواهند گرفت.در این مقاله سعی شده است تا بسیار مختصر و متناسب با محدودیت ها بزبانی ساده و قابل درک ساختار و نحوه کارکرد و کنترل موتورهای استپی و هماهنگ کردن آنها با مدار کنترلی بررسی و بیان شود.

امروزه در صنعت نیاز به منترل بازوهای متحرک یک دستگاه تراش CNC و یا کنترل چرخش یک شیر اتوماتیک و ساخت انواع رباط ها متحرک برای خط های تولید کارخانه ها و موارد بسیار زیاد دیگری از این قبیل وجود دارد که همگی توسط مدارات کنترل کننده زاویه و چرخش موتورها کنترل می شود.

این دستگاه ها شامل سنسورها و یا انکودرها برای تشخیص مقدار چرخش و مدارات کنترل کننده موتورها می باشند.
هدف از ساخت این پروژه است که با حرکت دادن یک انکودر بتوان یک استپ موتور را به همان مقدار و در همان جهت چرخاند که کاربرد این مدار می تواند در دستگاه های برش کاغذ ( استفاده برای حرکت دادن میز متحرک برش کاغذ ) و ماشین آلات چاپ ( استفاده برای کم و یا زیادذ کردن مقدار مرکب بر روی قسمت های مختلف کاغذ ) و مواردی نظیر اینها می باشد.
ابتدا در تغذیه مدار را وصل می کنیم و انکودر را می چرخانیم تا LED مربوط به نقطه صفر یا مبنا روشن شود در این نقطه کانال Z انکودر یک می شود و سپس استپ موتور را را نیز در نقطه نشان داده شده قرار می دهیم و سپس مدار را RESET می کنیم تا جافظه آن صفر شود.
انکودر را می چرخانیم تا نقطه مورد نظر ما برسد و سپس با زدن کلید SW1 مقدار چرخش انکودر روی LCD نشان داده می شود و با زدن کلید SW2 استپ موتور شروع به چرخش کرده و به نقطه ای که انکودر گردش کرده می چرخد.
این مدار تشخیص چرخش به سمت راست یا چپ را دارد و با توجه به چرخش انکودر به سمت راست و یا چپ استپ موتور را نیز به همان جهت می چرخاند.
نکته : اگر چرخش انکودر به بیش از 360 درجه برسد و یا چندین دور بچرخد مقدار چرخش روی LCD به صورت تعداددور و مقدار زاویه چرخش نشان داده می شود و استپ موتور نیز به همان مقدار می چرخد.
امکانات پروژه :
در این پروژه می توان با استفاده از انکودر مقدار چرخش موتوری که انکودر به آن متصل است را بدست آورد و در صنعت دارای کاربرد های به صورت زیر می باشد :
- تعیین مقدار سرعت کارکرد دستگاه ها
- مقدار زاویه که موتور در آنها قرار دارد
- استفاده در حلقه های PID
- استفاده برای محدود کردن زمان کارکرد و مقدار سرعت
- برای کنترل چند قسمت از یک سیستم
: قطعات بکار رفته در پروژه :
- میکرو کنترلر ATmega16 ( توضیحات فصل دوم )
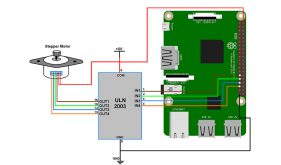
- Step motor ( توضیحات فصل سوم )
- انکودر ( 200 پالس – 4 سیمه – ساخت تبریز پژوه )
- Lcd 2*16
- ترانزیستور TIP 41
- IC رگولاتور 7805
- مقاومت 1KΩ
- LED
- DIP SWITCH ( برای ON/OFF میکرو )
- PUSH BOTTON
دانلود پروژه زاویه سنج با انکودر ( کنترل حرکت استپ موتور )
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید و همچنین میتوانید اپلیکیشن اندرویدی آموزش الکترونیک را هم نصب کنید.