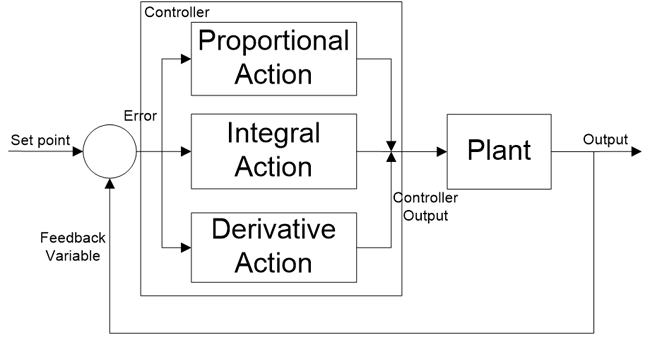
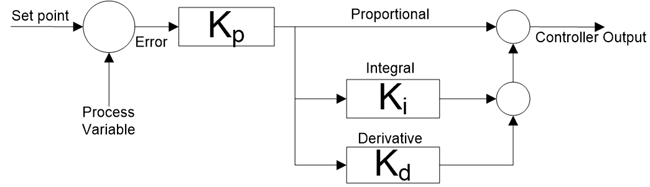
بیایید پیش از توضیح کنترل کننده PID دربارهی سیستم کنترل تجدیدنظر کنیم. دو نوع سیستم وجود دارد: سیستم حلقه باز و سیستم حلقه بسته، سیستم حلقه باز بهعنوان سیستم کنترل نشده نیز شناخته میشود و سیستم حلقه بسته بهعنوان سیستم کنترلشده شناخته میشود. در سیستم حلقه باز، خروجی کنترل نشده است چونکه در این سیستم فیدبکی وجود ندارد و در یک سیستم حلقه بسته خروجی با کمک کنترل کننده، کنترل میشود و این سیستم به یک یا تعداد بیشتری مسیر فیدبک نیاز دارد. یک سیستم حلقه باز بسیار ساده است اما در کاربردهای کنترل صنعتی مفید نیست چون این سیستم کنترل نشده است. سیستم حلقه بسته پیچیده است اما برای کاربردهای صنعتی پراستفاده است چون خروجی این سیستم میتواند در یک مقدار موردنظر پایدار باشد. PID مثالی از یک سیستم حلقه بسته است. نمودار بلوکی این سیستم در شکل 2 نمایش دادهشده است:
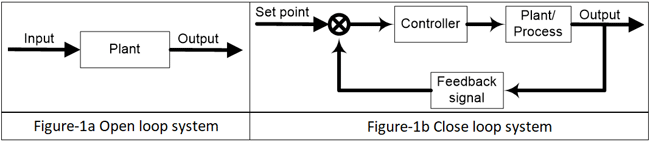
شکل 2: سیستمهای حلقه باز و حلقه بسته برای کنترل کنندهها
یک سیستم حلقه بسته بهعنوان سیستم کنترل فیدبک نیز شناخته میشود و این نوع از سیستم برای طراحی سیستم بهطور خودکار پایدار، در خروجی موردنظر و یا مرجع، استفاده میشود. به این دلیل، آن سیستم یک سیگنال خطا تولید میکند.
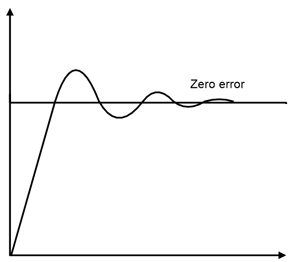
سیگنال خطا (e(t اختلاف بین خروجی (y(t و سیگنال مبنا (u(t است، وقتیکه این خطا صفر است به این معنا است که خروجی موردنظر بهدستآمده است و در این شرایط خروجی همانند سیگنال مبنا است.

برای مثال، یک ماشین خشککنی چندین مرتبه که از پیش تعیینشده است، کار میکند. وقتیکه ماشین خشککنی روشن میشود، تایمر شروع میکند و تا زمانی که شمارش تایمر تمام شود، ماشین خشککنی ادامه میدهد و خروجی یعنی لباس خشک را میدهد. این یک سیستم حلقه باز ساده است که خروجی نیازی به کنترل شدن ندارد و هیچ مسیر فیدبکی لازم نیست. اگر در این سیستم ما از یک سنسور رطوبتسنج که مسیر فیدبک را فراهم میکند، استفاده کنیم و آن را با نقطه تنظیمشده مقایسه کنیم و خطایی را تولید کنیم، ماشین خشککنی تا زمانی به کارش ادامه میدهد که این خطا صفر شود. این بدان معناست که وقتی رطوبت پارچه برابر رطوبت تنظیمشده است، ماشین خشککنی، کارکردن را متوقف میکند. در سیستم حلقه باز، ماشین خشککنی برای زمان ثابتی، صرفنظر از اینکه لباس خشک یا خیس است، کار میکند. اما در سیستم حلقه بسته، ماشین خشککنی برای زمان ثابتی کار نمیکند، ماشین خشککنی تا زمانی که لباس خشک شود، کارمی کند. این فایده سیستم حلقه بسته و استفاده از کنترل کننده است.

کنترل کننده PID و طرز کار آن
پس کنترل کننده PID چیست؟ کنترل کننده PID در سراسر جهان پذیرفتهشده است و پرکاربردترین کنترل کننده در کاربردهای صنعتی است، چونکه کنترل کننده PID ساده است، پایداری خوب و پاسخ سریعی را فراهم میکند. PID مخفف عبارتهای Proportional (تناسب)، Integral (انتگرال)، Derivative (مشتق) است. در هر کاربردی ضریب این سه عملیات برای به دست آوردن کنترل و پاسخ بهینه متفاوت است. ورودی کنترل کننده سیگنال خطا است و خروجی به دستگاه یا فرایند داده میشود. سیگنال خروجی کنترل کننده به روشی تولیدشده است که خروجی دستگاه برای رسیدن به مقدار موردنظر تلاش میکند.
کنترل کننده PID یک سیستم حلقه بسته است که سیستم کنترل فیدبک دارد و متغیر فرایند (متغیر فیدبک) را با نقطه تنظیمشده مقایسه میکند و سیگنال خطایی تولید میکند و بر طبق آن، خروجی سیستم را تنظیم میکند. این فرایند تا اینکه خطا صفر شود یا مقدار متغیرهای فرایند با مقدار تنظیمشده برابر شوند، ادامه مییابد.
* ما دربارهی عملیات تناست، انتگرال و مشتق بعداً در این مقاله، یاد میگیریم.
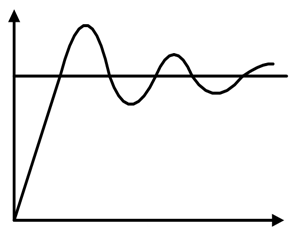
کنترل کنندهی PID نتایج بهتری نسبت به کنترل کننده خاموش/روشن میدهد. در کنترل کننده خاموش/روشن، تنها دو وضعیت برای کنترل سیستم در دسترس است. آن تنها میتواند خاموش و یا روشن باشد. کنترل کننده خاموش/روشن وقتیکه مقدار فرایند کمتر از نقطه تنظیمشده است روشن خواهد شد و وقتیکه مقدار فرایند بزرگتر از نقطه تنظیمشده است، میتواند خاموش شود. در این کنترل کننده خروجی هیچوقت پایدار نمیشود، خروجی همیشه در حدود نقطه تنظیمشده نوسان میکند. اما کنترل کننده PID نسبت به کنترل کننده خاموش/روشن دقیقتر و پایدارتر است.
کنترل کننده PID ترکیب سه عامل تناسبی، انتگرالی و مشتقی است. اجازه دهید به ما تا این سه عامل را یکییکی بفهمیم.
پاسخ تناسبی P
P با مقدار واقعی خطا متناسب است. اگر خطا بزرگ باشد، خروجی کنترل کننده هم بزرگ است و اگر خطا کوچک باشد خروجی کنترل هم کوچک است اما ضریب بهره Kp است. همچنین در نظر بگیرید، سرعت پاسخ هم بهطور مستقیم با ضریب بهره تناسبی (Kp)، متناسب است. بنابراین سرعت پاسخ با افزایش مقدار Kp زیاد میشود اما اگر Kp بیش از محدوده معمول افزایش یابد، متغیر فرایند شروع به نوسان کردن در سرعت بالا میکند و سیستم را ناپایدار میسازد.
(y(t) ∝ e(t
(y(t) = kp * e(t
که Kp، یک عامل بهره تناسب است.
پاسخ تناسبی کنترل کننده PID
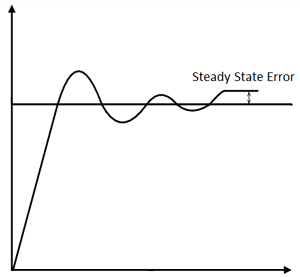
در اینجا، همانطور که در تساوی بالا نشان دادهشده، خطای بهدستآمده در ضریب بهره تناسبی (ثابت تناسب) ضرب شده است. اگر فقط کنترل کننده P استفاده شود، در آن زمان، ریست دستی لازم است چون خطای حالت پایدار (آفست) باقی میماند.
پاسخ انتگرالی (I)
بهطورکلی کنترل کننده انتگرالی برای کاهش خطای حالت پایدار استفاده میشود. I، انتگرال (نسبت به زمان) مقدار واقعی خطا است، به سبب انتگرالگیری، مقدار خطای بسیار کمی، پاسخ انتگرالی بسیار بزرگی را نتیجه میدهد. عملیات کنترل کننده انتگرالی ادامه مییابد تا خطا صفر شود.
(y(t) ∝ ∫ e(t)y(t) = ki ∫ e(t
که Ki، یک عامل بهره تناسب است.
بهره انتگرال با سرعت پاسخگویی رابطه معکوس دارد، افزایش Ki، سرعت پاسخگویی را کاهش میدهد. کنترل کنندههای انتگرالی و تناسبی بهطور ترکیبی (کنترل کننده PI) برای پاسخ پایدار و سرعت پاسخ خوب، استفاده میشوند.
پاسخ مشتق گیر D
کنترل کننده مشتق گیر بهصورت ترکیب PD و یا PID استفاده میشود. کنترل کننده مشتق گیر هیچگاه بهتنهایی استفاده نمیشود چون اگر خطا ثابت (غیر صفر) باشد، خروجی کنترل کننده صفر خواهد شد. در این وضعیت، کنترل کننده مانند حالت خطای صفر رفتار میکند، اما درواقع مقداری خطا (ثابت) وجود دارد. همانطور که در رابطه نشان دادهشده است، خروجی کنترل کننده مشتق گیر رابطه مستقیمی با سرعت تغییر خطا نسبت به زمان دارد. با حذف علامت تناسب، ما به ثابت بهره مشتق (Kd) میرسیم. بهطورکلی کنترل کنندههای مشتق گیر زمانی استفاده میشوند که متغیرهای فرایند شروع به نوسان کنند یا تغییرات در سرعت بسیار بالا داشته باشند. کنترل کنندههای مشتقی همچنین برای پیشبینی عملکرد آینده خطا، بهوسیلهی منحنی خطا استفاده میشوند. رابطه ریاضی بهصورت نشان دادهشده در زیر است:
y(t) ∝ de(t)/dty(t) = Kd * de(t)/dt
که Kd یک عامل بهره تناسب است.
کنترل کننده تناسبی و انتگرالی (PI)
این کنترل کننده، ترکیب کنترل کننده I و P است. همانطور که در معادله ریاضی زیر نشان دادهشده است، خروجی کنترل کننده جمع پاسخهای انتگرالی و تناسبی است.
y(t) ∝ (e(t) + ∫ e(t) dt)y(t) = kp *e(t) + ki ∫ e(t) dt
کنترل کننده مشتقی و تناسبی (PD)
این کنترل کننده ترکیب کنترل کنندههای P و D است. خروجی کنترل کننده مجموع پاسخهای مشتقی و تناسبی است. رابطه ریاضی کنترل کننده PD در زیر نمایش دادهشده است.
y(t) ∝ (e(t) + de(t)/dt)y(t) = kp *e(t) + kd * de(t)/dt
کنترل کننده تناسبی، انتگرالی و مشتقی ( PID )
این کنترل کننده ترکیب کنترل کنندههای P، I و D است. خروجی کنترل کننده مجموع پاسخهای تناسبی، انتگرالی و مشتقی است. رابطه ریاضی کنترل کننده PID در زیر نمایش دادهشده است.
y(t) ∝ (e(t) + ∫ e(t) dt + de(t)/dt)y(t) = kp *e(t) + ki ∫ e(t) dt + kd * de(t)/dt
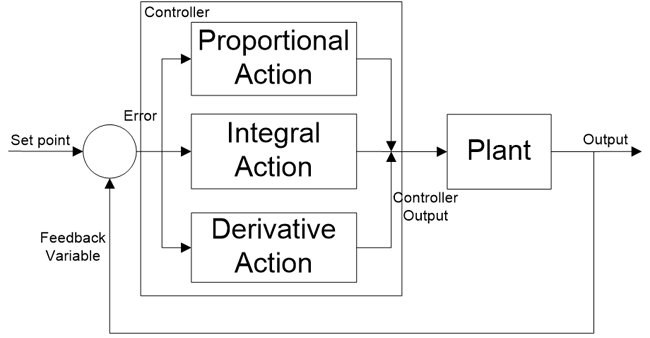
دیاگرام بلوکی (نمودار بلوکی) کنترل کننده PID
بنابراین با ترکیب این پاسخهای کنترلی تناسبی ، انتگرالی و مشتقی یک کنترل کننده PID تشکیل میشود.
روشهای میزان کردن برای کنترل کننده PID
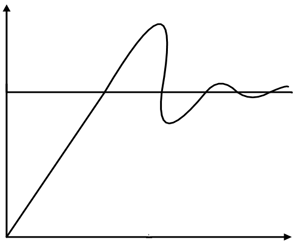
برای خروجی موردنظر، این کنترل کننده باید بهخوبی میزان شود. فرایند به دست آوردن پاسخ ایده آل از کنترل کننده PID با تنظیم کردن PID، میزان کردن کنترل کننده نامیده میشود. تنظیم کردن PID به معنای تنظیم کردن مقدار بهینهی بهره پاسخ تناسبی (Kp)، مشتقی (Kd) و انتگرالی (Ki) است. کنترل کننده PID برای جلوگیری از اختلال، میزان شده است بدین معنا که در یک نقطه تنظیمشده باقی میماند و فرمان را دنبال میکند، یعنی اگر نقطه تنظیمشده تغییر کند، خروجی کنترل کننده نقطه جدید را دنبال میکند. اگر کنترل کننده بهدرستی میزان شده باشد، خروجی کنترل کننده را با نوسان کمتر و میرایی کمتری نقطه تنظیمشده قابلتغییر را دنبال خواهد کرد.
شکل 8: جلوگیری از اختلال بهوسیله میزان ساز کنترل کننده PID
چندین روش برای میزان کردن کنترل کننده PID و رسیدن به پاسخ مطلوب وجود دارد. روش هایی برای میزان کردن کنترل کننده در زیر آمده است:
- روش آزمونوخطا
- روش منحنی عکسالعمل فرایند
- روش زیگلر-نیکولز (Ziegler-Nichols)
- روش رله
- استفاده از نرمافزار
1. روش آزمونوخطا:
روش آزمونوخطا بهعنوان روش تنظیم دستی نیز شناختهشده است و این روش سادهترین روش است. در این روش ابتدا مقدار Kp را افزایش دهید تا سیستم به پاسخ نوسانی برسد، اما سیستم نباید ناپایدار شود و مقدار Kd و Ki صفر نگهدارید. پسازآن، مقدار Ki را به روشی مانند آن، تنظیم کنید، نوسان سیستم متوقف میشود. پسازآن مقدار Kd را برای پاسخ سریع تنظیم کنید.
2. روش منحنی عکسالعمل فرایند:
این روش به روش تنظیم Cohen-Coon نیز شناختهشده است. در این روش ابتدا منحنی عکسالعمل فرایند در پاسخ به یک اختلال تولید میشود، بهوسیله این منحنی ما میتوانیم اندازه بهره کنترل کننده، زمان انتگرال و زمان مشتق را محاسبه کنیم. این منحنی با انجام دادن فرایند تست پله حلقه باز بهصورت دستی، مشخص میشود. پارامتر مدل را بهوسیلهی مقدار اولیه اختلال میتوان یافت. از این منحنی ما باید، شیب، زمان وقفه و زمان صعود منحنی که چیزی جز مقدار Kp،Ki و Kd نیست را پیدا کنیم.
3.روش زیگلر-نیکولز:
در این روش هم ابتدا مقدار Ki تنظیم کنید و Kd صفر است. بهره تناسب (Kp) افزایش مییابد تا به بهرهی نهایی (Ku) برسد. بهره نهایی چیزی جز بهرهای که در آن خروجی حلقه شروع به نوسان میکند، نیست. این Ku و تناوب نوسان Tu برای به دست آوردن بهرهی کنترل کننده PID از جدول زیر، استفاده میشوند.
| Kd | Ki | Kp | Type of controller |
| – | – | 0.5 Ku | P |
| – | 0.54 Ku/Tu | 0.45 Ku | PI |
| 3 Ku Tu/40 | 1.2 Ku/Tu | 0.60 Ku | PID |
4. روش رله:
این روش بهعنوان روش Astrom-Hugglund نیز شناختهشده است. اینجا خروجی بین دو مقدار متغیر کنترل، تغییر میکند، اما این مقادیر به طریقی انتخابشدهاند که فرایند باید از نقطه تنظیمشده عبور کند. وقتیکه متغیر فرایند کمتر از نقطه تنظیمشده است، خروجی کنترل به مقدار بیشتری تنظیم میشود. وقتیکه مقدار فرایند بزرگ تراز نقطه تنظیمشده است، خروجی کنترل به مقدار کمتری تنظیم میشود و شکل موج خروجی تشکیل میشود. تناوب و دامنه این شکل موج نوسانی اندازهگیری میشود و برای تعیین بهره نهایی Ku و تناوب Tu که درروش بالا استفاده میشود، به کار میرود.
5. استفاده از نرمافزار:
برای میزان کردن PID و بهینهسازی حلقه، بستههای نرمافزاری موجود هستند. این بستههای نرمافزاری داده را جمعآوری میکنند و مدل ریاضی سیستم را میسازند. با این مدل، نرمافزار پارامتر تنظیم مطلوب را از تغییرات مرجع پیدا میکند.
ساختار کنترل کننده PID
کنترل کنندههای PID بر اساس تکنولوژی ریزپردازندهها طراحی میشوند. تولیدکنندههای مختلف از معادله و ساختار PID مختلف استفاده میکنند. معادله PID سری، ایدآل و موازی، رایجترین معادلات PID ای هستند که استفاده میشوند. کنترل کننده PID دارای کابرد های بسیاری است که در آینده در میکرو دیزاینر الکترونیک باهم برسی میکنیم و سعی کنید ساختار آن را خوب یاد بگیرید.
در معادله PID موازی، عملیات مشتق، انتگرال و تناسب بهطور جداگانه با یکدیگر کار میکنند و اثر ترکیب این سه عملیات، کار در سیستم است. نمودار بلوکی این نوع از PID در زیر نشان دادهشده است.
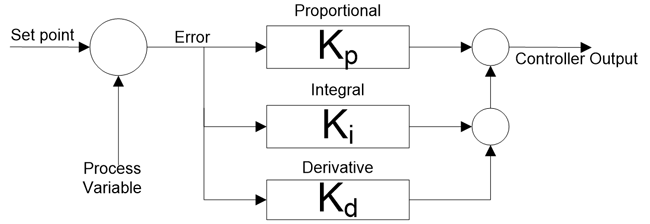
شکل 9: نمودار بلوکی کنترل کننده PID موازی
در معادله PID ایدآل، بهره ثابت Kp بر روی تمام ترم ها پخششده است. بنابراین تغییر Kp بر تمام عبارات دیگر در معادله تأثیر میگذارد.
شکل 10: نمودار بلوکی کنترل کننده PID ایدآل
در معادله PID سری، بهره ثابت Kp مانند معادله PID ایدآل بر روی تمام ترمها توزیعشده است، اما در این معادله ثابت مشتق و انتگرال، بر عملیات تناسب تأثیر دارند.
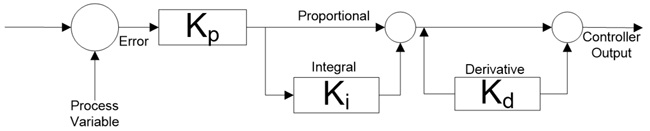
شکل 11: نمودار بلوکی کنترل کننده PID سری
کاربردهای کنترل کننده PID
کنترل دما
اجازه دهید که مثالی از AC(تهویه کننده هوا) هر دستگاه (فرایندی) بزنیم. نقطه تنظیمشده دمای 20 درجه سلسیوس است و دمای فعلی اندازهگیری شده بهوسیلهی سنسور 28 درجه سلسیوس است. هدف ما اجرای سیستم تهویه مطبوع در دمای موردنظر 20 درج سلسیوس است. اکنون کنترل کننده سیستم تهویه مطبوع، سیگنالی بر طبق خطای 8 درجه سلسیوس ایجاد میکند و این سیگنال به تهویه کننده هوا داده میشود. بر طبق این سیگنال خروجی تهویه کننده هوا تغییر میکند و دما به 25 درجه سلسیوس کاهش مییابد. تعداد بیشتری از چنین فرایندی تکرار خواهد شد تا سنسور دما، دمای موردنظر را اندازهگیری کند. وقتیکه خطا صفر است، کنترل کننده فرمان توقف را به تهویه کننده هوا میدهد و دوباره دما تا مقدار معین افزایش مییابد و دوباره خطا ایجاد میشود و فرایند مشابهی بهطور پیوسته تکرار میشود.
به عنوان یک تمرین میتوانید سورس کامل پروژه ترموستات دیجیتال با AVR موجود در سایت را کاملا رایگان دانلود و یک کنترلر PID روی آن پیاده سازی کنید. میتوانید نتایج به دست آماده را با ما به اشتراک بگذارید.
طراحی MPPT (ردیابی نقطه حداکثر توان) شارژ کنترل کننده برای صفحههای خورشیدی فوتوولتائیک
مشخصه جریان-ولتاژ یک سلول فوتوولتائیک به دما و سطح تابش بستگی دارد. بنابراین جریان و ولتاژ کار به نسبت تغییر شرایط جوی، تغییر خواهد کرد. بنابراین ردیابی نقطه توان حداکثر برای یک سیستم فوتوولتائیک کارا بسیار مهم است. برای پیدا کردن MPPT، کنترل کننده PID مورداستفاده قرار میگیرد و برای آن جریان و ولتاژ نقطه موردنظر به کنترل کننده داده میشود. اگر شرایط جوی تغییر کند این دنبال کننده، ولتاژ و جریان را ثابت نگه میدارد.
مبدلهای الکترونیک قدرت
کنترل کننده PID، در کاربردهای الکترونیک قدرت مانند مبدلها بسیار مفید است. اگر مبدلی به سیستم متصل باشد بر اساس تغییر بار، باید خروجی مبدل تغییر کند. برای مثال یک اینورتر (مبدل جریان مستقیم DC به جریان متناوب AC) به بار متصل شده است، اگر بار افزایش یابد، جریان بیشتری از اینورتر جریان مییابد؛ بنابراین پارامترهای ولتاژ و جریان ثابت نیستند، بر اساس نیاز تغییر میکنند. در این شرایط کنترل PID برای تولید پالسهای PWM برای سوئیچینگ (قطع و وصل شدن) IGBT های اینورتر استفاده میشود. بر اساس تغییر بار سیگنال فیدبک به کنترل کننده داده میشود و (سیگنال) خطا تولید میشود. پالسهای PWM بر اساس سیگنال خطا، تولید میشوند. بنابراین در این شرایط ما میتوانیم ورودی متغیر و خروجی متغیر را با یک اینورتر به دست آوریم.
For more : Introduction to ControlPID
به پایان یک جلسه آموزشی دیگر رسیدیم ولی یادگیری هیچ وقت پایان ندارد. توصیه میکنم درس های مفاهیم پایه الکترونیک ،آموزش طراحی منابع تغذیه سوئیچینگ را بصورت کاملا رایگان مطالعه کنید.
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید و همچنین میتوانید اپلیکیشن اندرویدی آموزش الکترونیک را هم نصب کنید.

با سلام
از مطالب مفید و ارزنده تون خیلی خیلی سپاسگزارم
امیدوارم همیشه موفق و پایدار باشید
سلام، خیلی ممنون آقا محمد نظر لطف شماست. آروزی موفقیت و سلامتی.
درود بر شما بسیار منسجم و عالی توضیح دادید.
مرسی عالی بود
درمورد ماژول های شارژ و دشارژ یه سؤال داشتم .
چطور ولتاژ یه باتری تک سل لیتیومی روی ۵ولت ثابت میشه اول با چاپر زیادش میکنن ؛بعد بارگولاتور ثابتش میکنن روی ۵ولت ؟یا به شکل دیگه ای این کارو انجام میدن ؟
سلام یک سوال داشتم.اگر در یک کنترل کنندهpمقدارkpخیلی زیاد شود کنترل کننده به بک کنترل کنندهon/offتبدیل می شه؟
سلام مهندس وقتتون بخیر
عالی بود اما ی نکته کوچیک اینکه درون نمودار بلوکی کنترل کننده PID سری از بلوک Kd دو فلش خارج شده که این درست نیست
سلام.
خیلی تشکر می کنم که سایت هایی مثل شما پایه ایی با موضوعات برخورد میکنه
و از مطلبتون تا حدودی زیادی قانع شدم
خیلی ممنون
بسیار روان مطلب رو انتقال دادید.سپاس فراوان
ضمن عرض سلام و ادب
مطالب بالا بسیار عالی و کاربردی بود .
از زحمات شما بسیار متشکرم
اگر امکان دارد منابع را ذکر می کنید ؟
سلام، نظر لطف شماست. منبع این نوشته آخر نوشته است.
سلام ببخشید چرا در کنترل کنندهdiوجود ندارد؟؟
با سلام و عرض ادب من به دنبال کنترل کننده های صنعتی میگشتم که به موضوع PID شما برخوردم و خیلی بارم جالب بود چون بدون حاشیه و پیچیدگی به مطلب پرداخته بود . بخش های مورد نظر در راستای کنترل کننده های RDC6442XG و ساختارهای FPGA میباشد . با تشکر و سپاس از زحماتی که شما عزیزان در این مسیر متحمل میشوید
بسیار عالی. درمورد سیستم های کنترلی مرتبه دوم هم توضیح دهید. با سپاس
سلام
وقت بخیر
خیلی ممنون از مطالب مفیدتون
اگر چند تا pid کنترلر داشته باشیم، چگونه باید ضرایب kp ,… را تنظیم کرد؟