کلیات طرح طراحی و ساخت روبات لیفتراک با قابلیت کنترل از راه دور
پروژه مورد نظر ، طرح یک ربات لیفتراک با قابلیت کنترل از راه دور است.مدار فوق از دو قسمت تشکیل شده است:
1) قسمت فرستنده :
این قسمت که در اختیار کاربر قرار می گیرد و شامل چهار کلید برای هدایت ربات در چهار جهت و دو کلید برای بلند کردن و پایین گذاشتن بار و یک ماژول فرستنده برای فرستادن اطلاعات می باشد .
2) قسمت گیرنده :
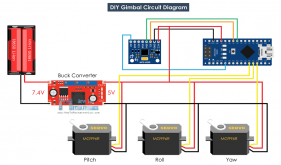
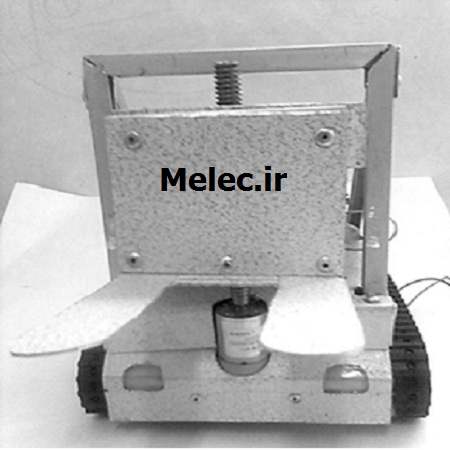
این قسمت که شامل یک ماژول گیرنده ودو موتور گیربکس دار همراه با چرخ های تانکی در طرفین برای به حرکت در آوردن موتور و یک موتور گیربکس دار در جلو دستگاه برای حرکت دادن قسمت لیفت به سمت بالا و پایین و قسمت مکانیکی حرکت ربات می باشد . ربات فوق درچهار جهت حرکت کرده و توسط کاربر کنترل می شود و در زمانی که کار بر موتور را به جلوی بار مورد نظر (که بر روی سکوی مخصوص قرار دارد) هدایت کرد می تواند آن را به سمت بالا هدایت کرده و به مکان مورد نظر ببرد و بر روی زمین قرار دهد.
مجموع فرستنده و گیرنده در دو پکیج جدا از هم قرار دارند .
كاربرد های صنعتی روبات ها را در زمان كنونی می توان به سه گروه زیر دسته بندی كرد :
1) حمل مواد ، تخلیه و بار گیری : در این حالت كار روبات ها ، جابه جه كردن مواد و قطعات از جایی به جایی دیگر است .
2) كاربردهای فرایندی : این كاربرد ها عبارتند از نقطه جوشكاری ، جوش كاری قوسی ، رنگ پاشی و عملیاتی كه در آنها وظیفه روبات كاربرد ابزاری خاص برای انجام برخی كارهای تولیدی در كارگاه هاست .
3) مونتاژ و بازرسی : هر دو كارهای متمایز در این گروه قرار می گیرند . مونتاژ با روبات توجه بسیاری را به خود جلب كرده است ، زیرا امكانات بالقوه زیبادی دارد . روبات های بازرسی نیز با استفاده از حساسه ها ، مشخصات محصول را اندازه گیری می كنند .
در این میان ربات های بار بر و لیفتراک به دلیل اینکه هم فشار بار را از دوش انسان بر می دارند و هم در صورت قابل کنترل بودن ، دیگر نیازی به شخص برای کنترل دستگاه ندارند ، اهمیت زیادی در صنعت یافته اند.
اطلاعاتی که در این پروژه کسب می شود:
شبیه سازی یک ربات لیفتراک به صورت بی سیم و کنرل از راه دور . که در طول این پروژه با مواردی مانند ارتبات سریال میکرو ها ، کار با فرستنده و گیرنده های ASK و FSK ، کنترل موتور DC ، موتور های گیربکس دار ، آشنایی با درایور L298 ، آی سی ULN2803 و در نهایت نحوه ساخت قسمت های مکانیکی آشنا شدم
و کار بیشتر با نرم افزار هایی مانند پرتیوس و کدویژن.
دانلود ها :::
دانلود فایل ها(در صورت خراب بودن لینک بالا)
نوع فایل :PDF
رمز : melec.ir
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید و همچنین میتوانید اپلیکیشن اندرویدی آموزش الکترونیک را هم نصب کنید.