موتور های دی سی بدون جاروبک با استفاده از سنسور اثر هال (راه اندازی موتور براشلس با سنسور اثر هال)،
پیکربندی تعویض جریان و PWM
در موتور های براشلس برای تغییر و تعویض جریان از کلید های الکترونیکی استفاده می شود و به همین ترتیب موتور می چرخد .
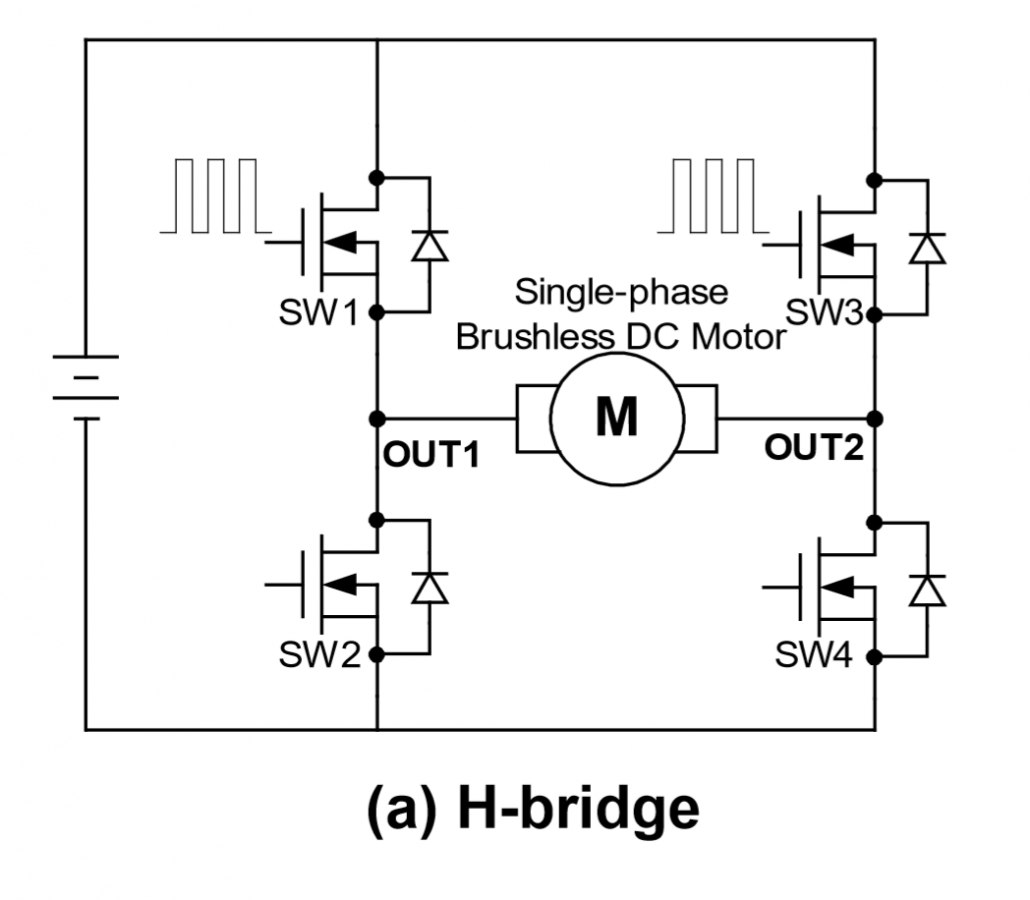
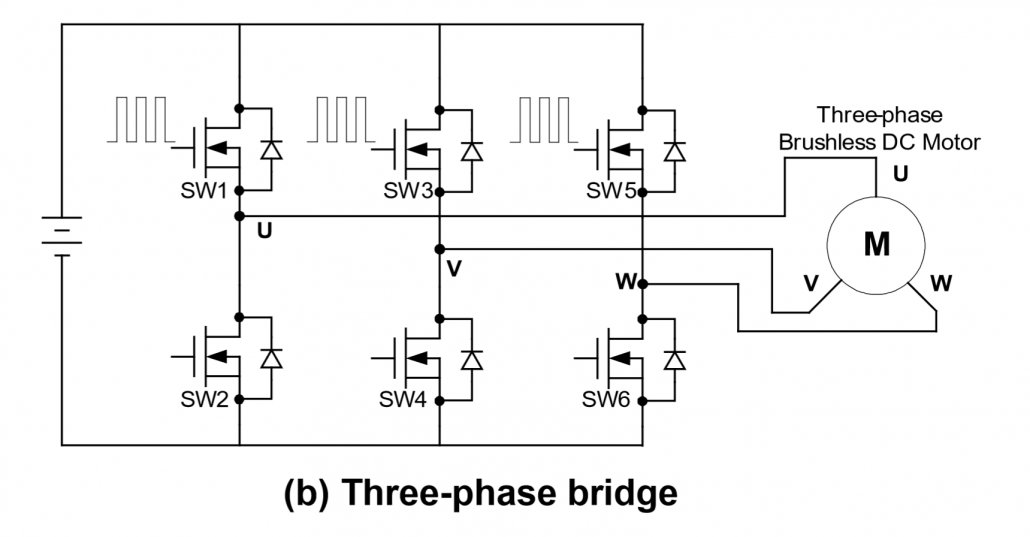
در موتور های براشلس تک فاز، معمولا ساختار switch ( کلید الکترونیکی )، به صورت یک ساختار H-bridge ( پل H ) می باشد و یک ساختار پل سه فاز ، برای یک موتور سه فاز BLDC در شکل نشان داده شده است.
معمولا از کلید های high-side ( زود تغییر ) و با استفاده از نوسان پهنای پالس (PWM) برای کنترل موثر و آسان جریان شروع ( startup ) ، سرعت و گشتاور استفاده می شود. به طور کلی ، افزایش فرکانس switch (فرکانس تعویض جریان ) ، باعث افزایش تلفات PWM می شود ، هر چند کاهش آن موجب محدودیت پهنای باند سیستم و افزایش جریان های پالسی ، در نقاطی که موجب تخریب یا از بین رفتن درایور موتور براشلس می شوند می شود .

قواعد چرخه تعویض الکترونیکی
موتور براشلس تک فاز
تعویض و جابجایی ها در موتور به بازخورد موقعیت موتور ، برای فعال کردن سوییچ های متناظر ( که گشتاور بزرگتری حاصل شود ) بستگی دارد ، راحت ترین راه بدست آوردن موقعیت درست روتور استفاده از سنسور است ، اکثر سنسورهای موقعیت ، سنسور اثر هال می باشد . موتورهای براشلس اکثرا دارای سنسورهای هال هستند ، که بر روی استاتور ، انتهای قسمت غیر گردشی موتور نصب می شوند.
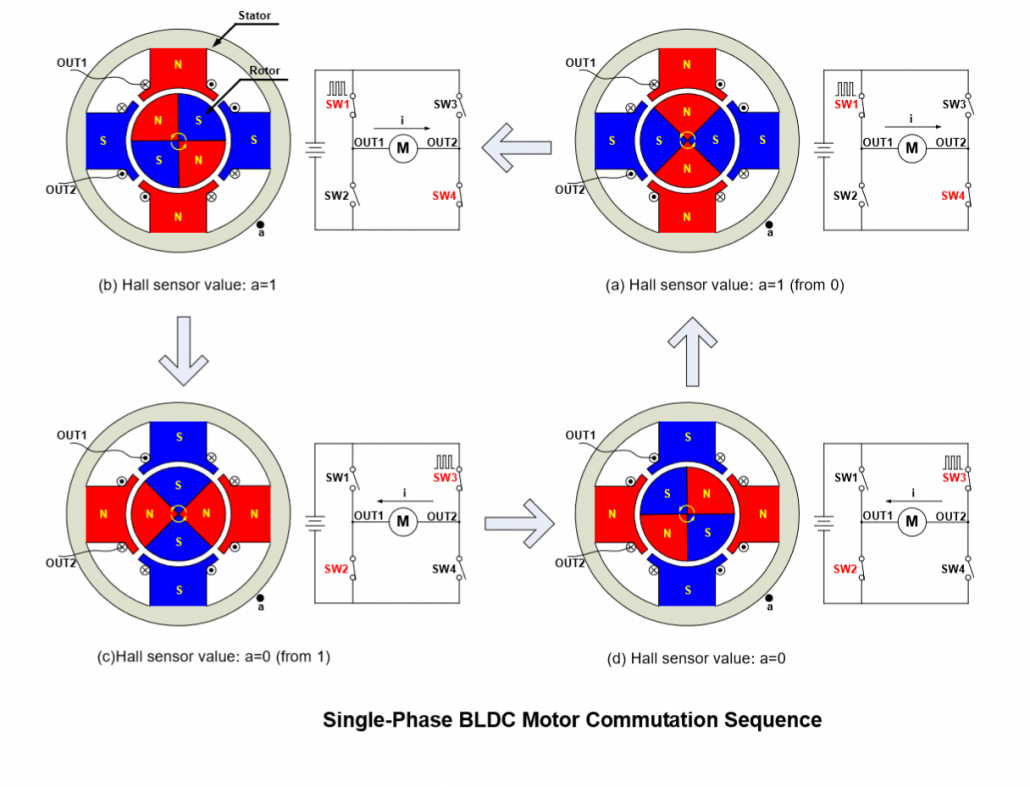
در شکل زیر ، مدار درایور موتور تک فاز براشلس در مراحل یک چرخه ی تعویض ، نشان داده شده است . آهنرباهای دائمی روتور در دخل استاتور قرارداده شده اند . یک سنسور موقعیت اثر هال (“a”) ، خارج از استاتور نصب شده که متناسب با نیروی مغناطیسی ولتاژ خروجی تغییر می کند ( فرض می کنیم قطب شمال N روتور خروجی سنسور را به ولتاژ بالا (HIGH) و قطب جنوب s روتور آن را به ولتاژ پایین LOW تغییر می دهد ). موقعی که خروجی سنسور HIGH می باشد SW1 و SW4 روشن هستند ، در شکل a و b .
در این مرحله جریان ارمیچیر از OUT1 به OUT2 از داخل سیم پیچ استاتور حرکت کرده و قطب الکترومغناطیسی استاتور ، به طور متناوب و مطابق سنسور عوض می شود . نیروی مغناطیسی حاصل از میدان مغناطیسی روتور و میدان الکترومغناطیس استاتور باعث چرخیدن روتور می شود ، پس از 90 درجه چرخش روتور ، خروجی سنسور هال به علت نزدیکی به قطب s معکوس می شود ، SW2 و SW3 روشن شده و جریان معکوس از OUT2 به OUT1 حرکت می کند ، (شکل d و c). قطب های معکوس شده استاتور ، روتور را مجبور به ادامه حرکت در همان جهت می کنند.
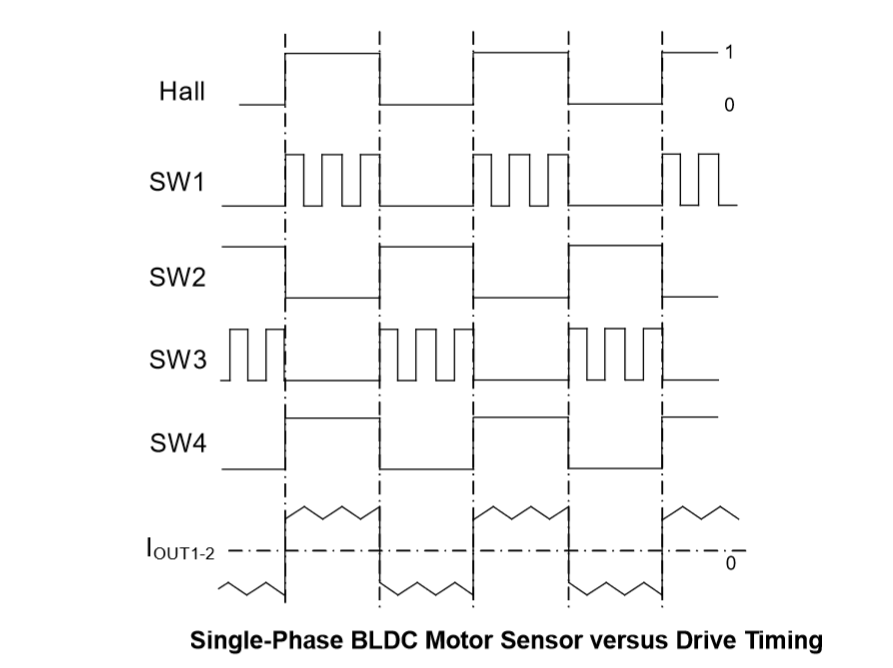
در شکل زیر مثالی از سیگنال خروجی سنسور هال ، با توجه به تغییرات switch ها و جریان آرمیچر نشان داده شده که باعث و علت آن ، کنترل PWM می باشد . سه پارامتر ولتاژ اعمالی ، فرکانس تعویض اتصالات (Switching) و دوره ی PWM ، سه پارامتر کلیدی برای تعیین سرعت و گشتاور موتور هستند .
در جلسه بعد در مورد موتور های BLDC سه فاز با استفاده از سنسور هال صحبت خواهیم کرد…
جلسات قبلی را اینجا ببینید :
موتور های براشلس یا بدون جاروبک BLDC Motor
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید و همچنین میتوانید اپلیکیشن اندرویدی آموزش الکترونیک را هم نصب کنید.
سلام ، خیلی ممنون.
بسیار عالی
ممنون