در درس این جلسه میخواهیم در مورد موتور پلهای و چگونگی عملکرد آن صحبت کنیم. پس با معرفی آن و توضیح اینکه چه ویژگیهای منحصربه فردی دارد آغاز میکنیم.
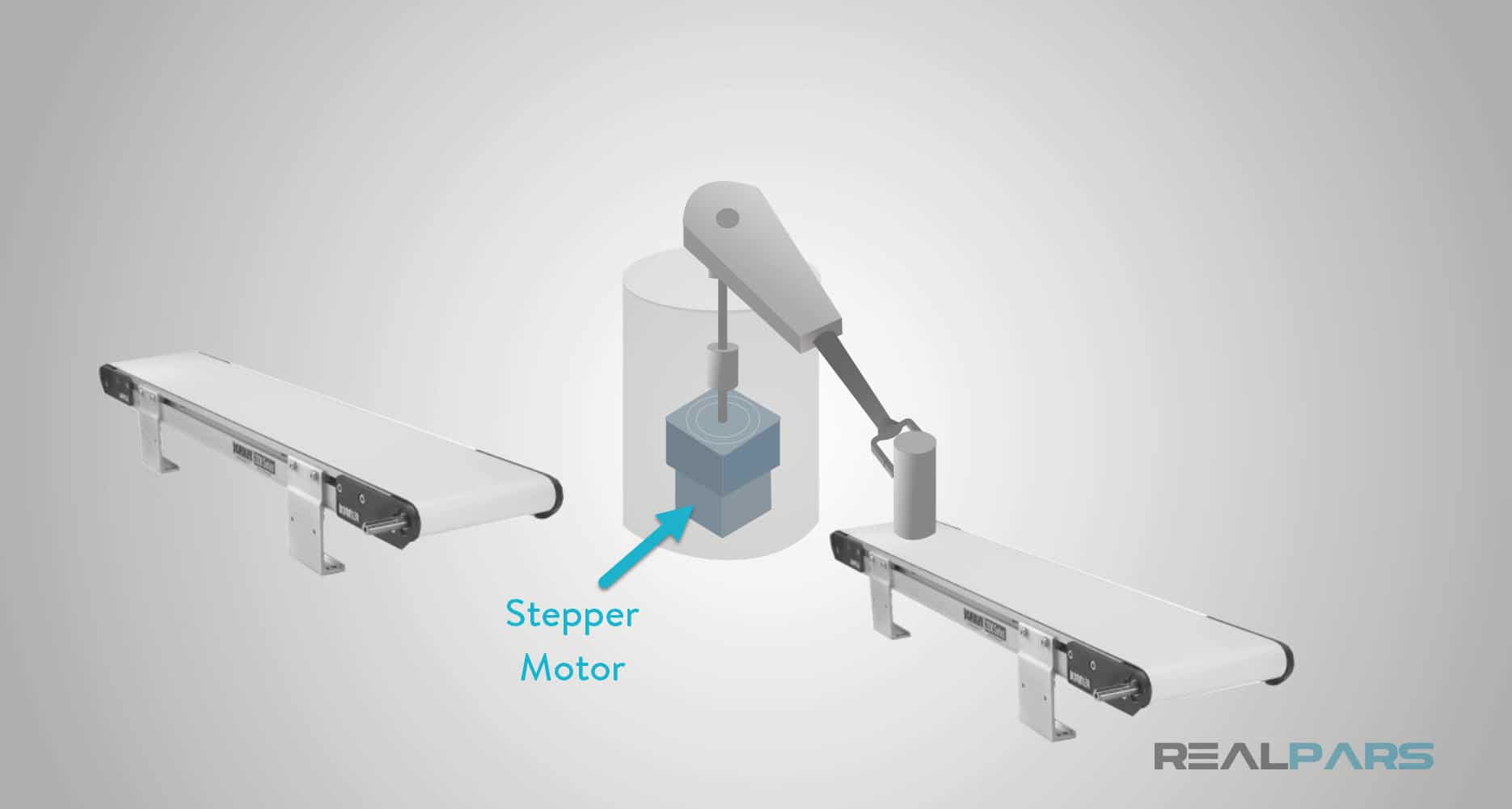
آیا تا به حال فکر کردهاید که حرکات دقیق بازوی یک ربات چگونه اتفاق میافتد؟ یا اینکه یک پرینتر گرافیکی، چگونه میتواند نسخههای دقیقی از یک تصویر را کپی کند؟ یا حتی به اینکه چگونه محصولات تولیدی در یک کارخانه، با دقت و نظم روی خط تولید جابهجا میشوند؟ تا به حال به این فکر کردهاید که سیستمهای موقعیتیابی کنترل حرکت چگونه کار میکنند؟
پس از مطالعهی این درس و شاید تکمیل آن در مباحث بعدی، شما در مورد سیستمهای کنترل حرکتی که در آنها از انواع موتور های موجود – به طور عمده استپر موتور و سروو موتور– استفاده میشود، مطالب کافی را خواهید آموخت.
- مقاله مرتبط مفید: نحوه کار موتورهای الکتریکی و انواع موتورهای الکتریکی
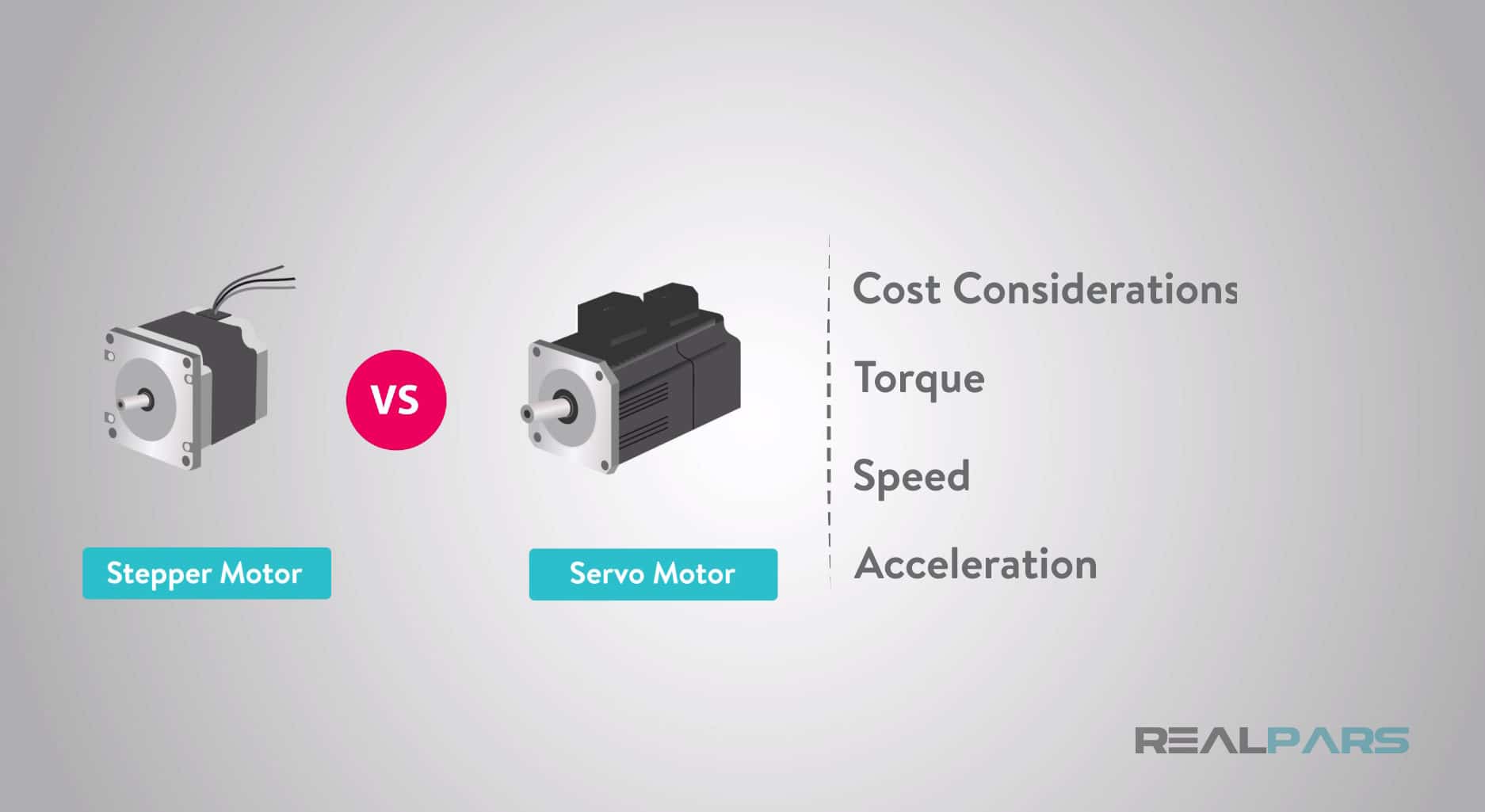
اما انتخاب میان استفاده از سروو موتور و یا استفاده از استپر موتور خود یکی از چالشهای طراحی این سیستمهای کنترلی است که فاکتورهای متعددی در زمان طراحی بر آن موثر هستند. به عنوان مثال ملاحظات مالی، گشتاور، سرعت، شتاب و مدار درایو که همگی در تعیین نوع موتور انتخابی تاثیرگذار هستند.
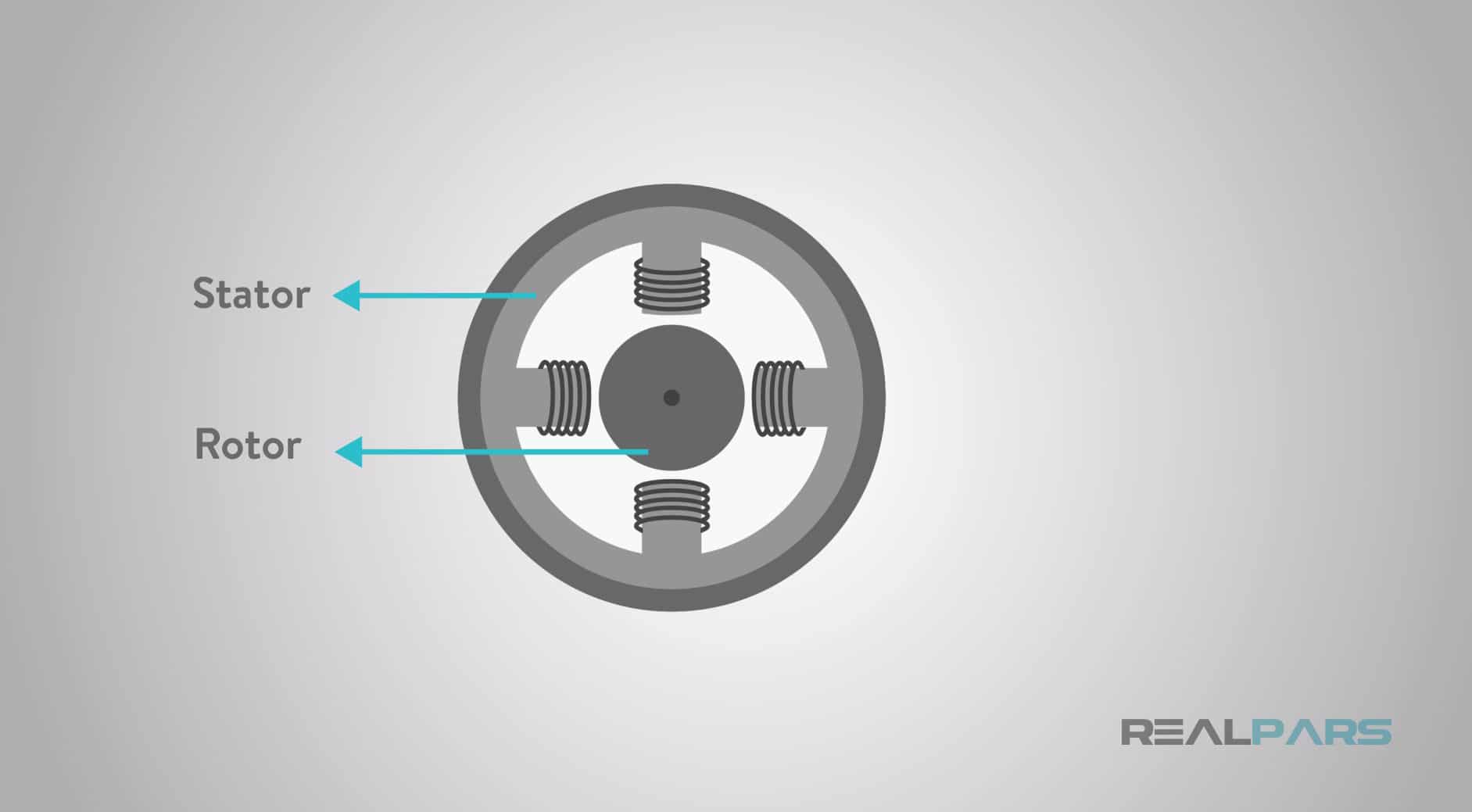
استپر موتورها یک محور (shaft) دوار دارند که به صورت دائمی دارای خاصیت مغناطیسی شده است و به آن روتور گفته میشود و نیز تعدادی الکترومگنت ثابت دارند که اطراف روتور را احاطه کردهاند و به آنها استاتور گفته میشود.
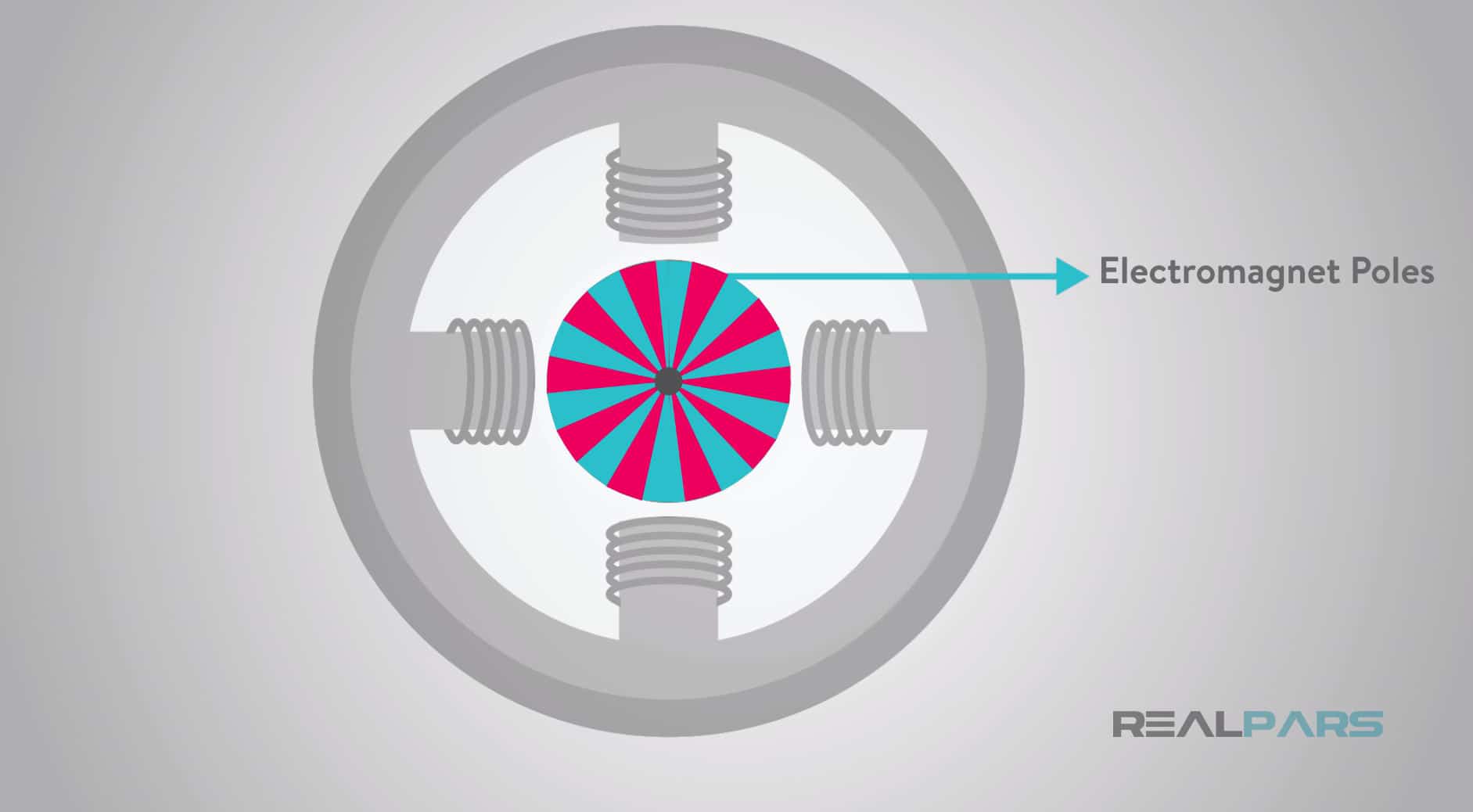
استپر موتورها بین 50 تا 100 قطب الکترومغناطیسی دارند (به صورت جفتهای N و S) که یا به وسیلهی یک آهنربای دائمی و یا به وسیلهی جریان الکتریکی ایجاد شدهاند.
هرکدام از این قطبهای مغناطیسی دائمی، برای شافت موتور یک نقطهی توقف محسوب میشوند و به همین علت هرچه تعداد قطبها بیشتر باشد، استپر موتور موقعیتیابی و حرکتهای دقیقتری میان هر دو قطب انجام خواهد داد و در نتیجه کنترل حرکت آن نیز دقیقتر خواهد بود.
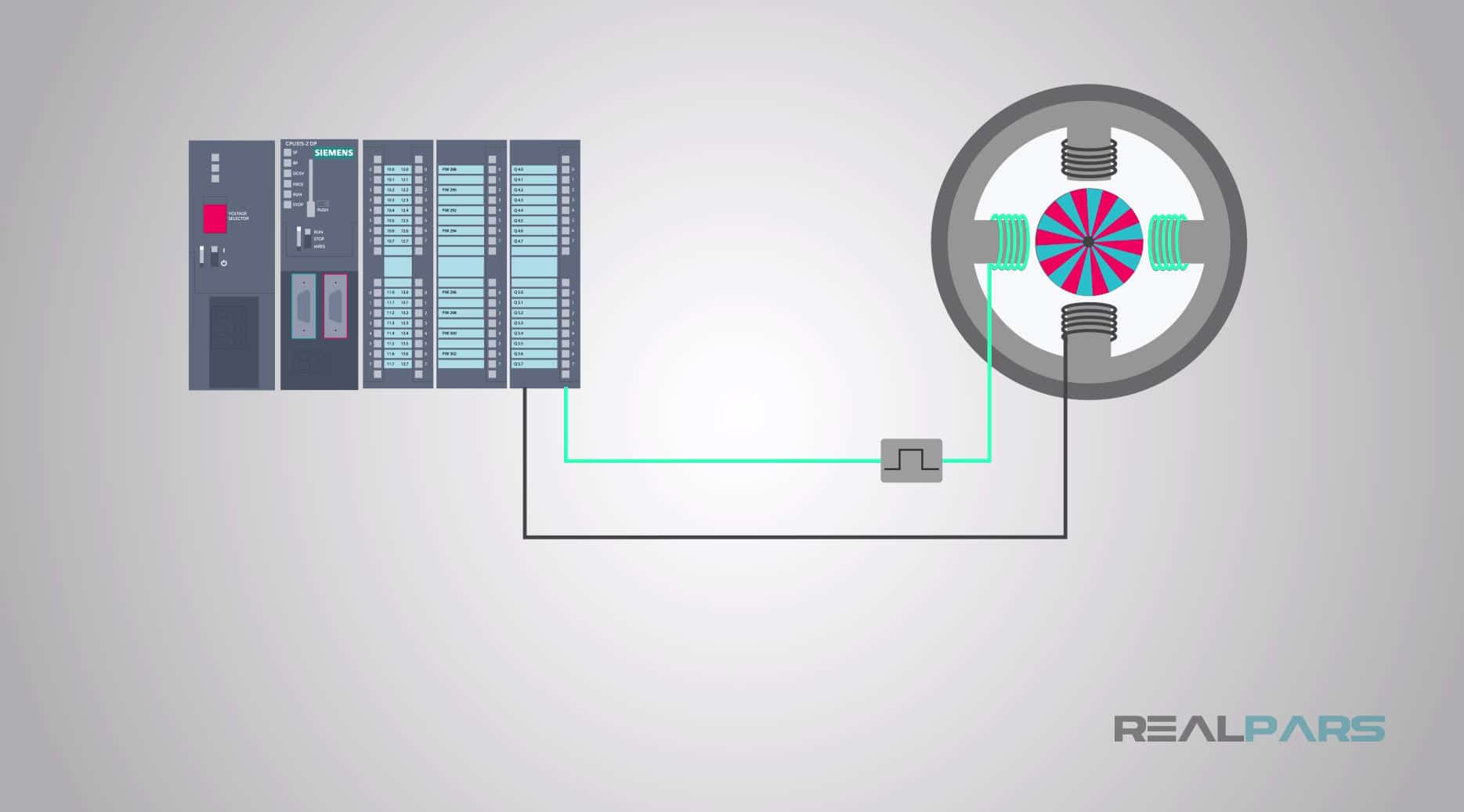
اگر کمی به این طرز عملکرد استپر موتور فکر کنید، میبینید که دارای چه ویژگی جالبیست که بدون نیاز به ایجاد فیدبک موقعیت در هر لحظه، استپر موتور میتواند تنها با کمک قطبها، حرکات دقیق و پله پلهای را تولید کند. به عبارت دیگر، استپر موتور با یک سیستم کنترلی حلقهباز کار میکند. این کنترل حلقهباز بدین صورت است که کافیست یک پالس از سمت کنترلر دریافت شود تا شافت موتور از یک قطب به سمت قطب بعدی حرکت کند و دقیقا زمانی که موقعیت آن با قطب الکترومغناطیسی بعدی تراز شد، از حرکت بایستد، بدون اینکه نیاز باشد فیدبکی از موقعیت آن به کنترلر ارسال شود تا کنترلر بخواهد آن را از حرکت باز دارد.
این تنها یکی از ویژگیهای خوب استپر موتورهاست. اما استپر موتورها ویژگیهای خوب و مزایای دیگری نیز دارند که صحبت در مورد آنها را فعلا به آموزشهای بعدی موکول میکنیم.
اگر بخواهیم رزولوشن حرکت را افزایش دهیم، یا به عبارت دیگر گامهای حرکات دوار را بیشتر کنیم، باید در زمان طراحی تعداد قطبهای بیشتری را در نظر بگیریم.
بنابراین تعداد گامهای افزایشی یک استپرموتور، روی یک درجهی مخصوص تنظیم میشود که متناسب با تعداد قطبهای الکترومغناطیسی آن است و با این توضیحات میتوان حدس زد که مسئلهی حرکت موتور به یک موقعیت دقیق، در واقع مسئلهی ارسال تعداد دقیق و درست سیگنال دستوری از سوی کنترلر است که موتور را به آن موقعیت مدنظر برساند.

روتور در استپر موتورها ممکن است تا حدود 200 دندانه داشته باشد و یا به عبارت دیگر، در هر یک دور چرخش کامل شافت موتور، طی کردن 200 الی 400 گام نیاز باشد.
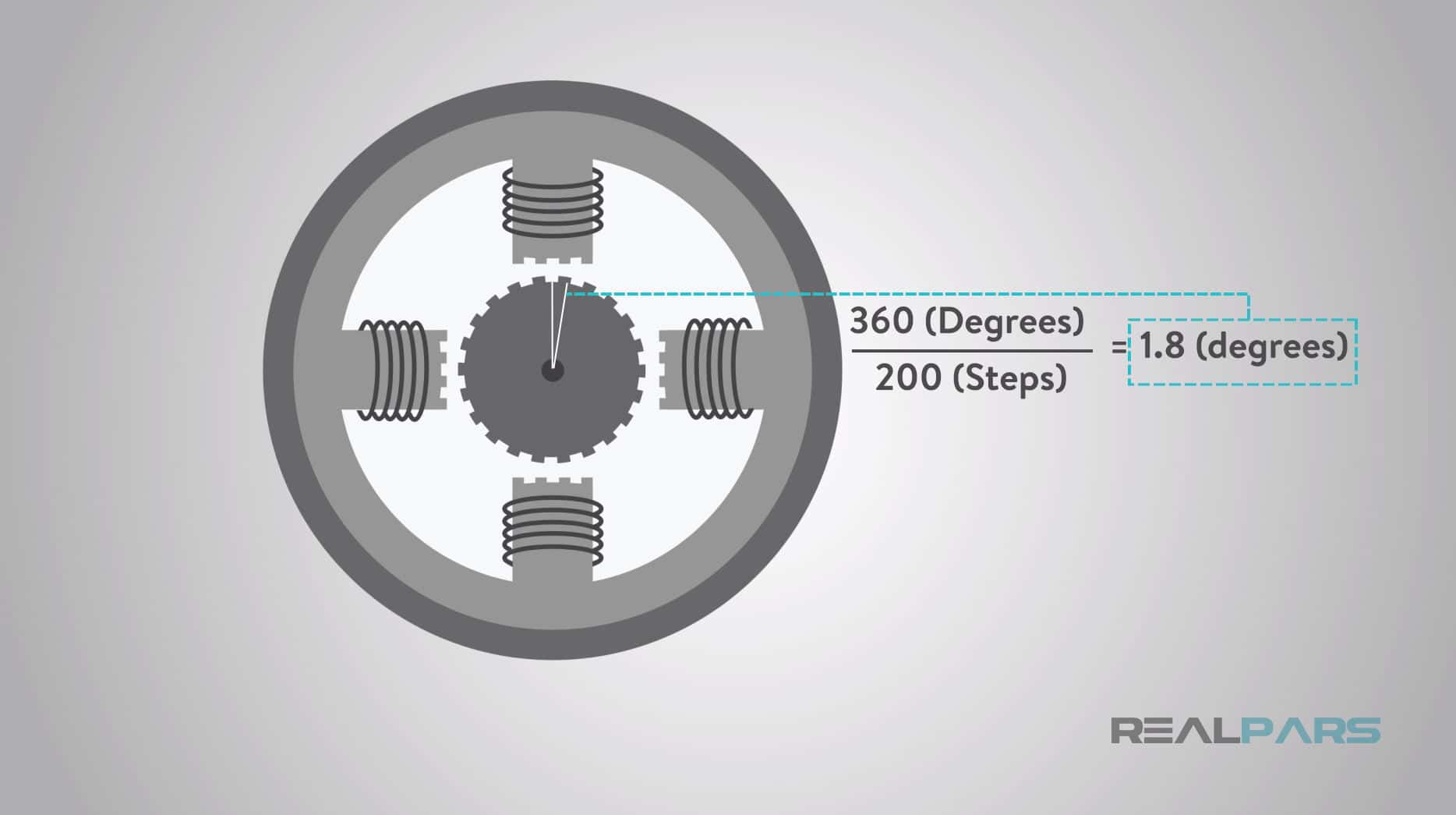
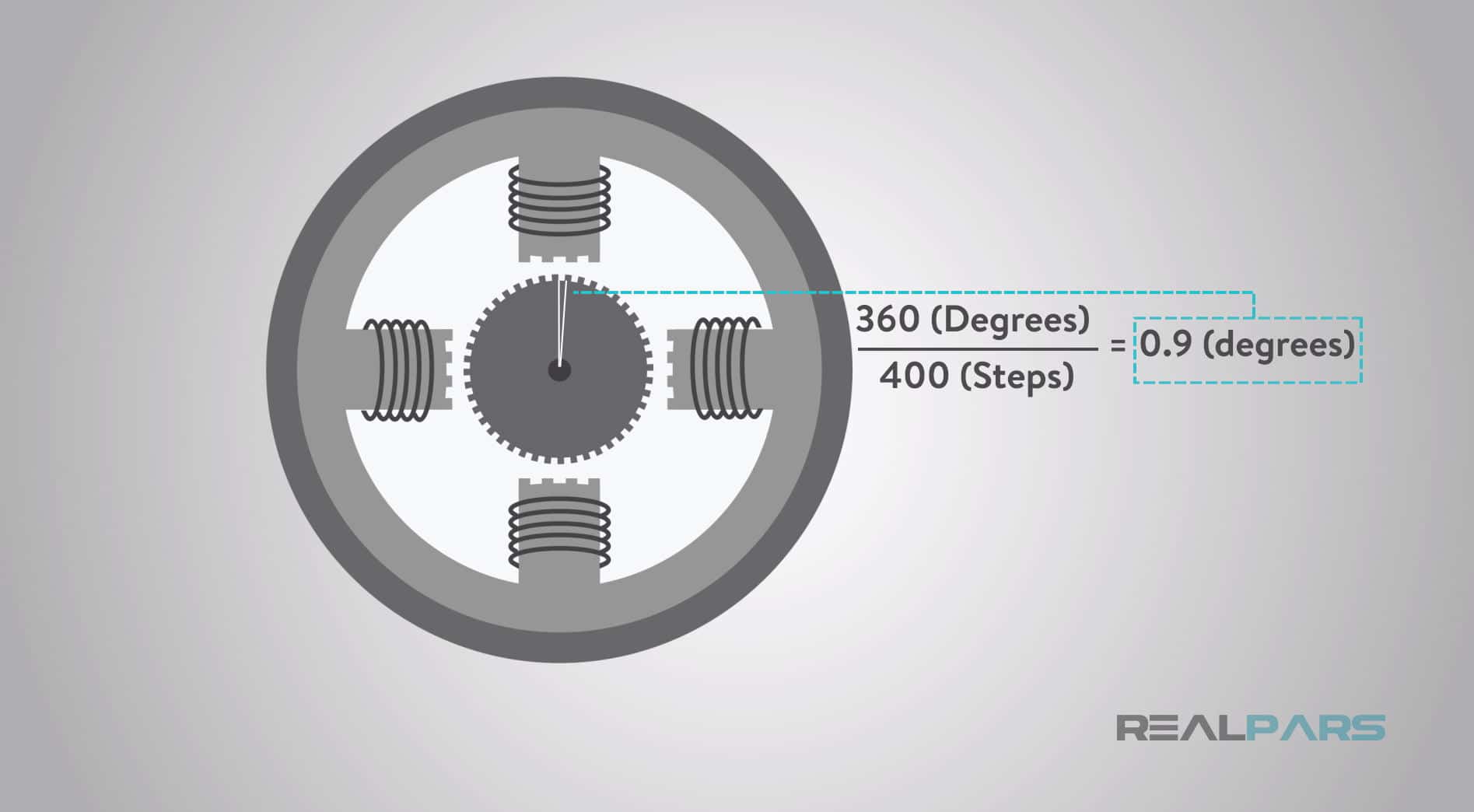
برای تعیین رزولوشن میتوانیم دست به دامن ریاضیات و قدری فرمولبازی شویم. اگر یک استپر موتور 200 گام داشته باشد و ما بدانیم که یک دور چرخش کامل شافت معادل 360 درجه است، کافیست 360 را تقسیم بر 200 کنیم تا زاویهی طی شده در هر یک گام کامل بدست آید که در اینجا معادل 1.8 درجه میشود.
و اگر موتور دیگری 400 گام داشته باشد، طبق همین فرمول، هر گام آن رزولوشنی معادل 0.9 درجه خواهد داشت و از طرفی نیز میدانیم که هر پالس دیجیتالی که از سوی کنترلر صادر میشود، معادل با حرکت یک گام رو به جلو است.
حالا بیایید حرکت یک استپر موتور را با کمک یک نمودار ساده دنبال کنیم تا ببینیم در یک دور حرکت کامل، چه اتفاقاتی رخ میدهد.
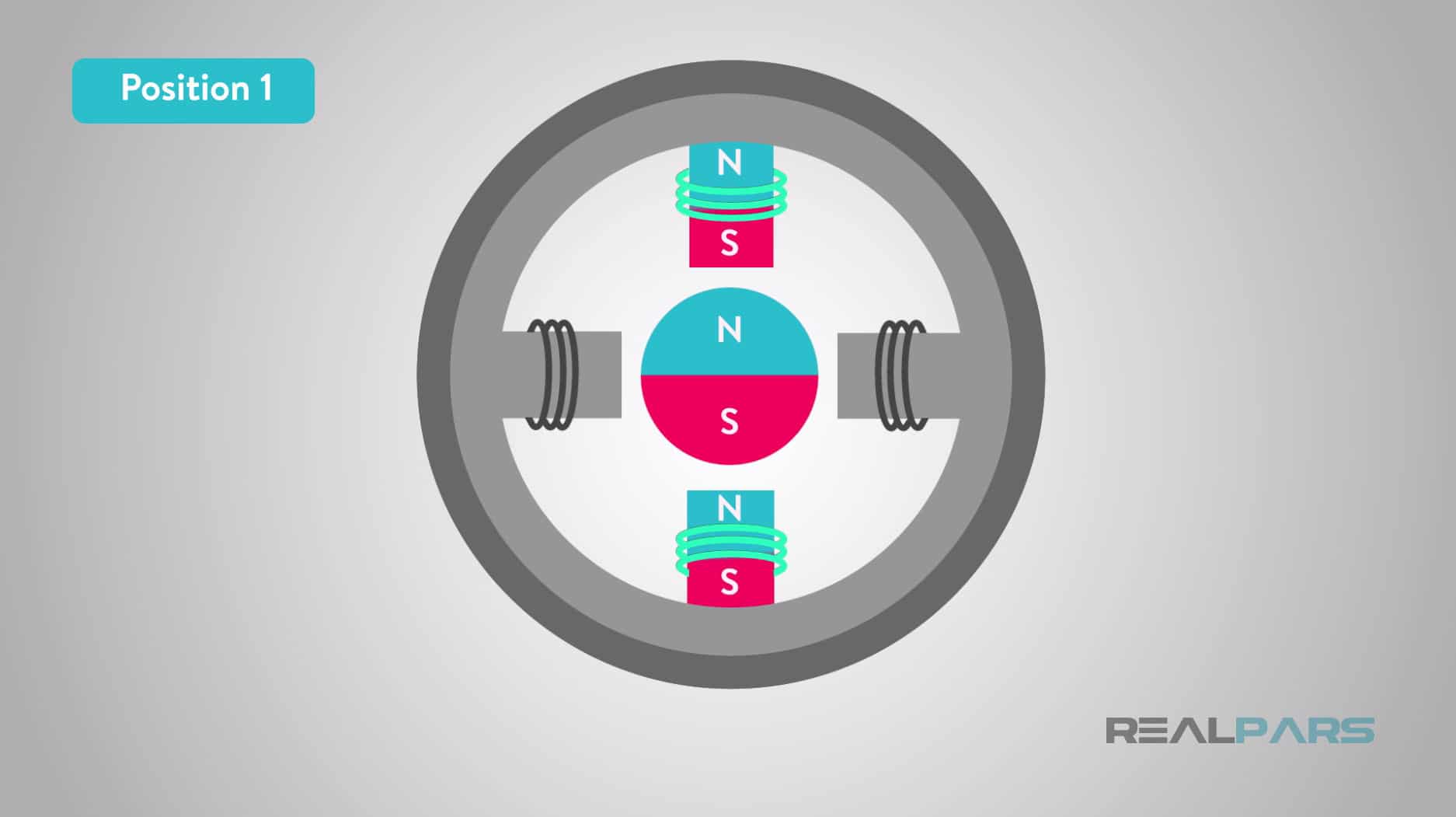
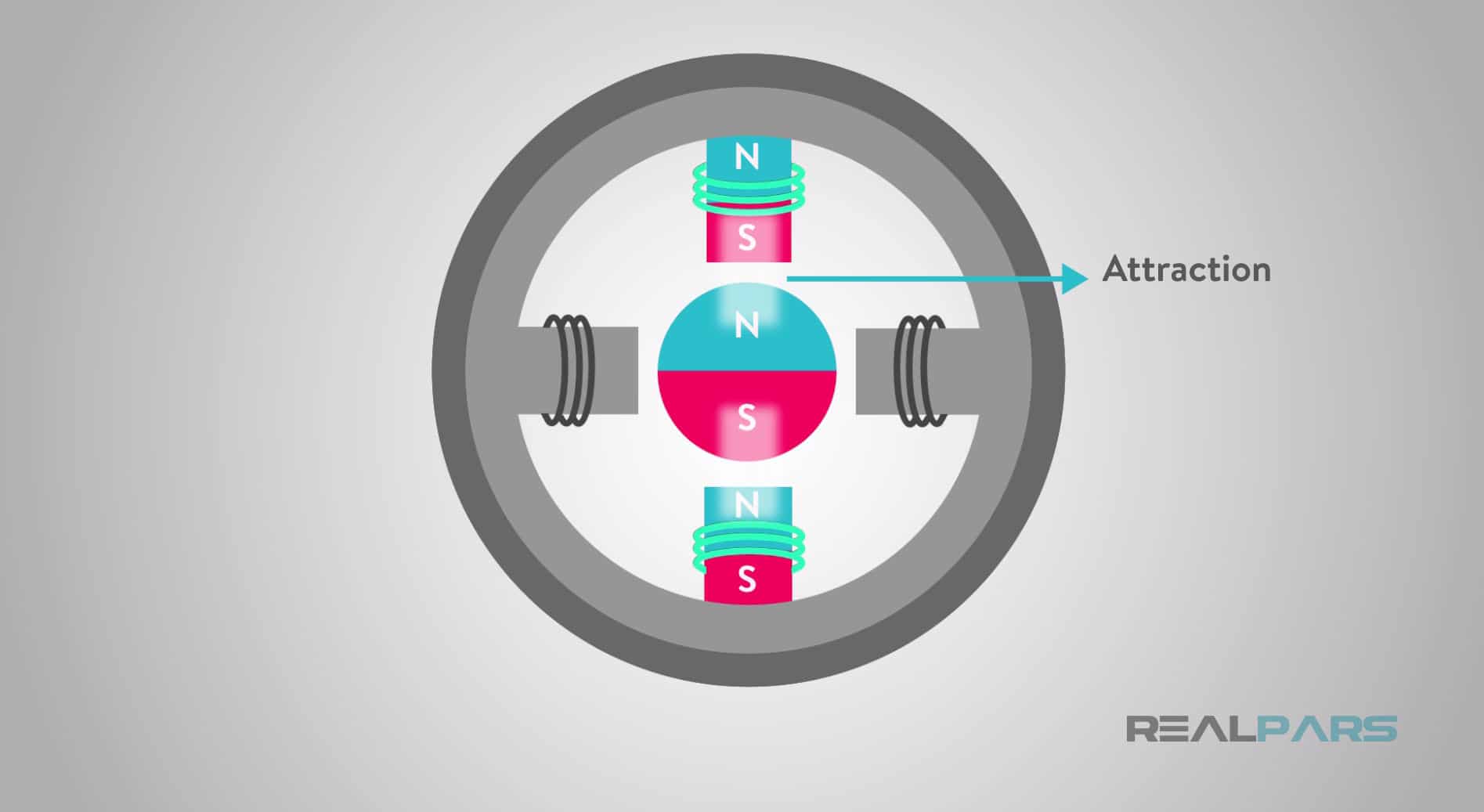
زمانیکه موتور در موقعیت 1 قرار داشته باشد (تصویر زیر را ببینید)، نقطهی شروع حرکت روتور از مقابل بالاترین قطب الکترومغناطیسی استاتور است که بواسطهی جریانی که از سیم میگذرد ایجاد شده است.
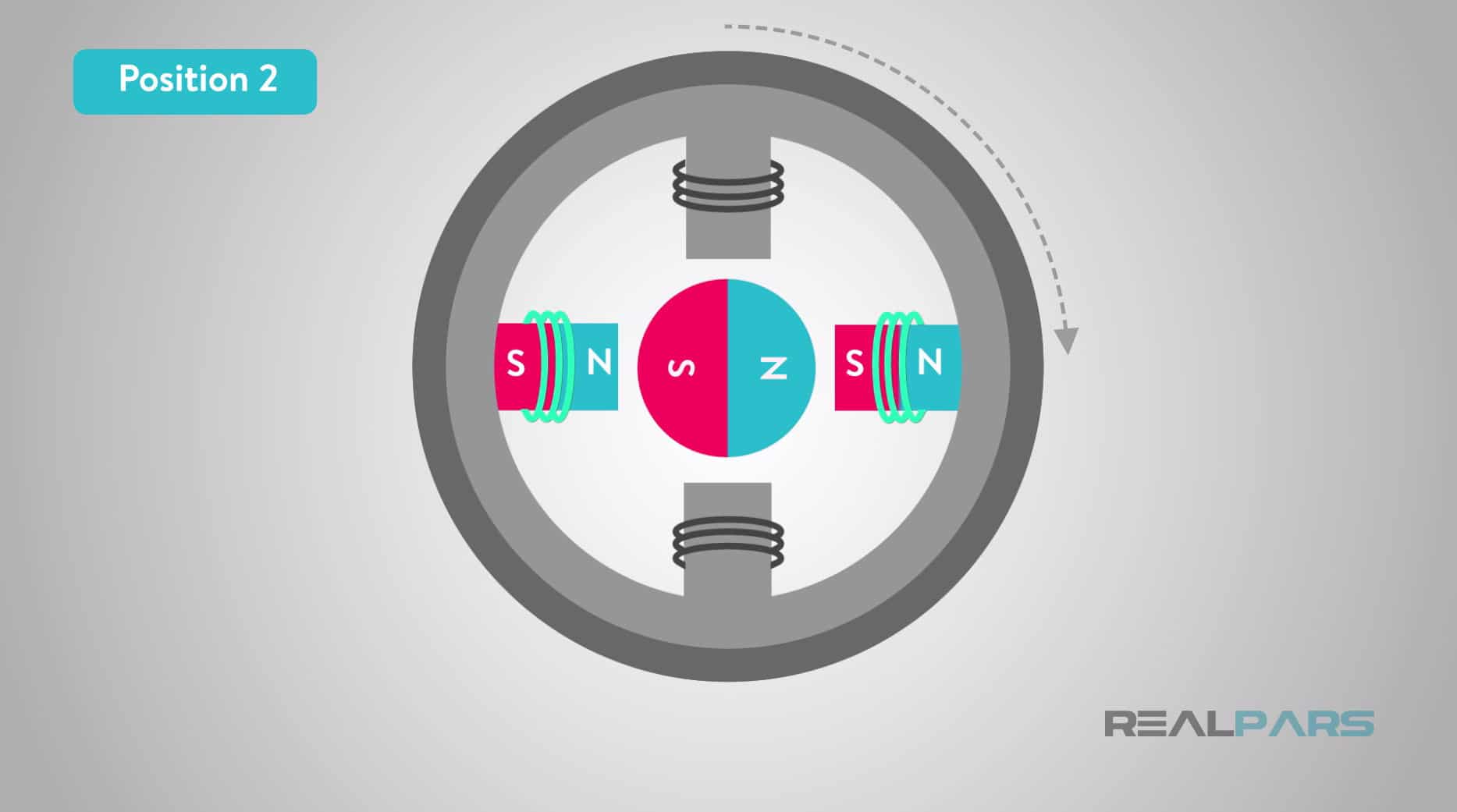
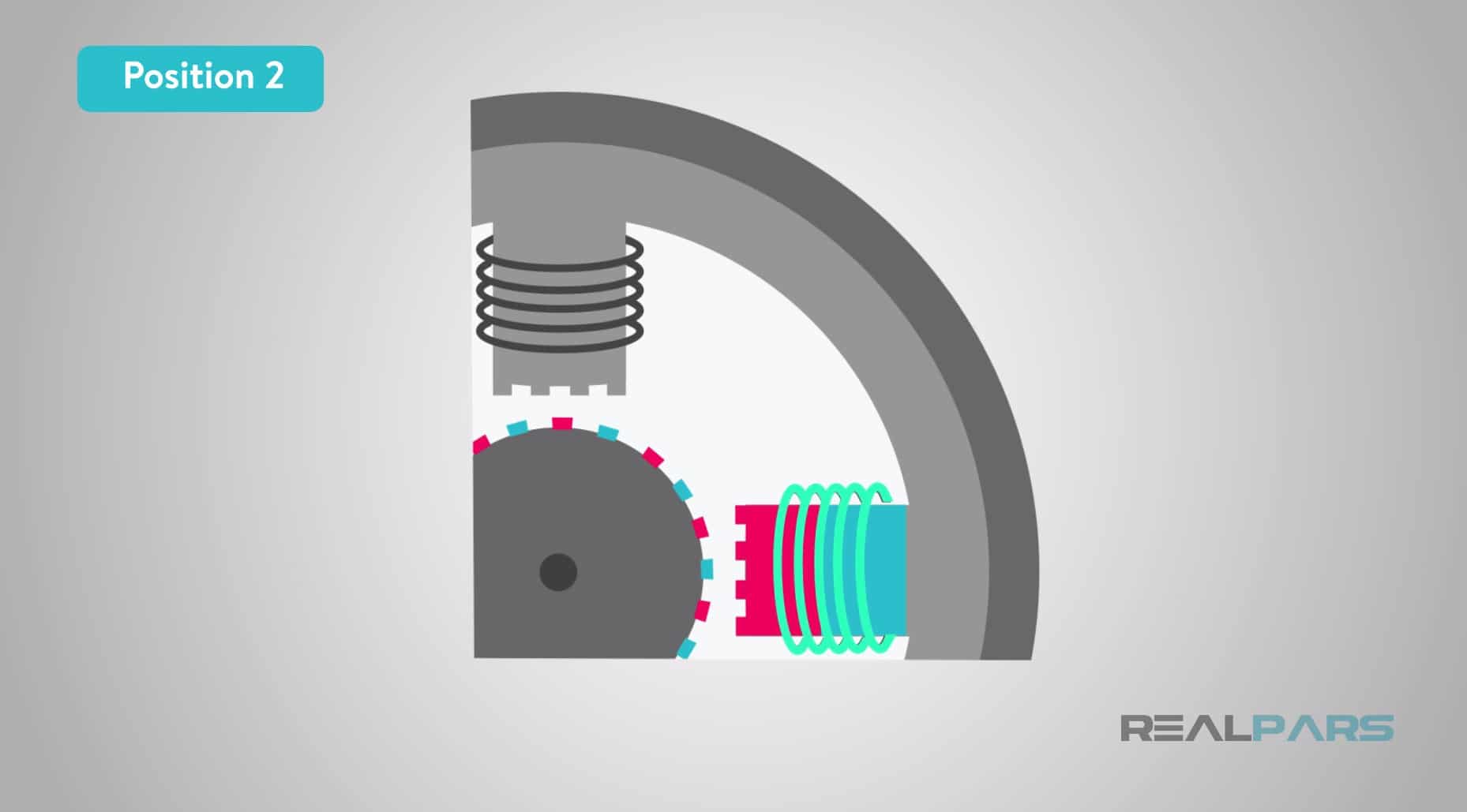
حالا اگر بخواهیم استپر موتور در جهت ساعتگرد حرکت کند، قطب بالایی استاتور و جفت نظیر آن غیرفعال میشوند (از طریق خاموش کردن جریان) و در عوض قطب سمت راستی و جفت نظیر آن فعال میشوند. به این ترتیب روتور 90 درجه در جهت ساعتگرد خواهد چرخید تا در مقابل قطب افقی تراز شود. این را موقعیت 2 مینامیم که در تصویر زیر نشان داده شده است.
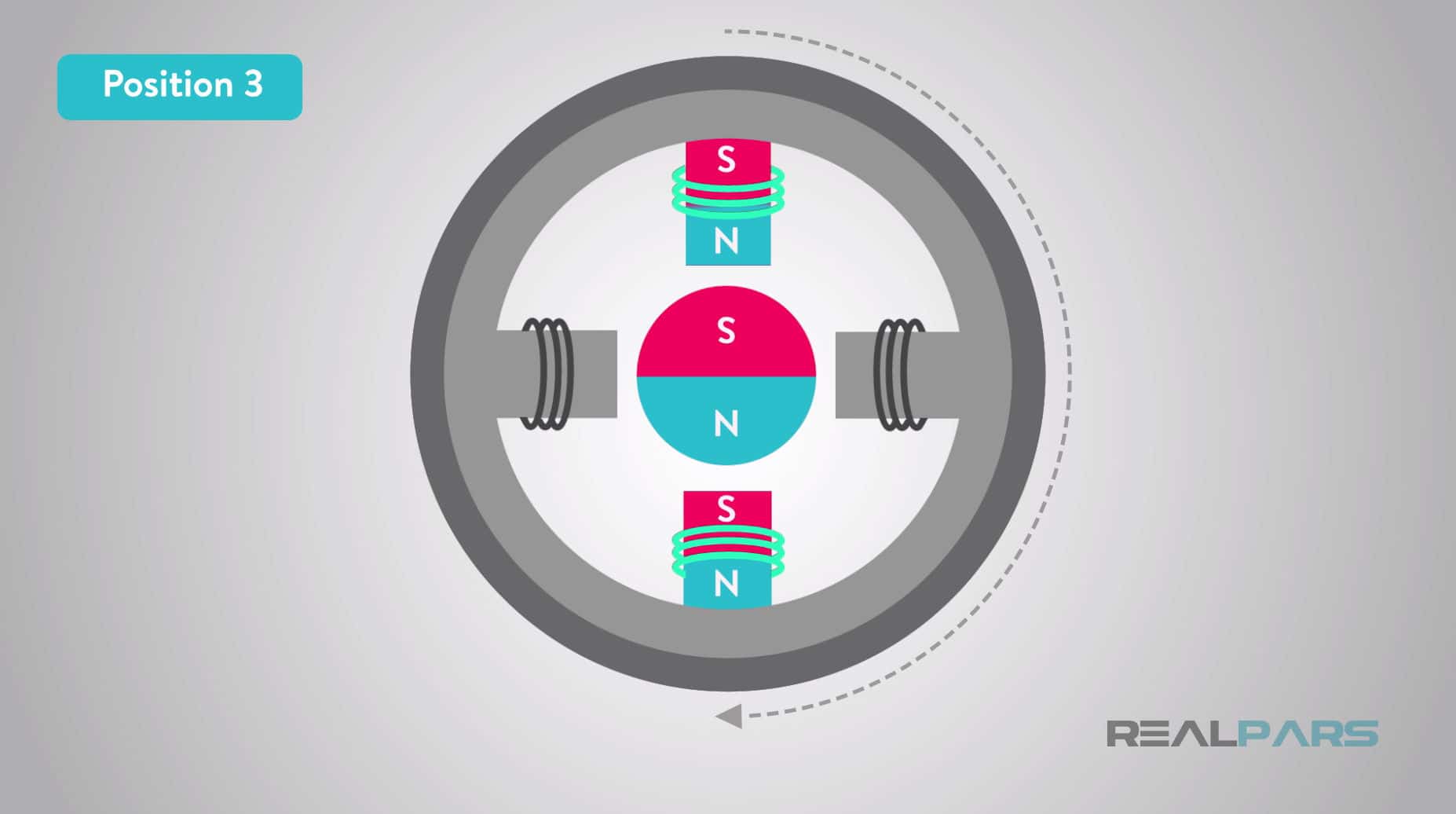
و به همین ترتیب فعال و غیرفعال کردن قطبهای پیرامون استاتور را ادامه میدهیم تا موتور هربار 90 درجهی دیگر در جهت ساعتگرد حرکت کند و مقابل قطب بعدی قرار گیرد. بنابراین موتور به ترتیب در موقعیتهای 3 و 4 نیز قرار گرفته و یک دور گردش کامل را که معادل با 360 درجه است طی میکند.
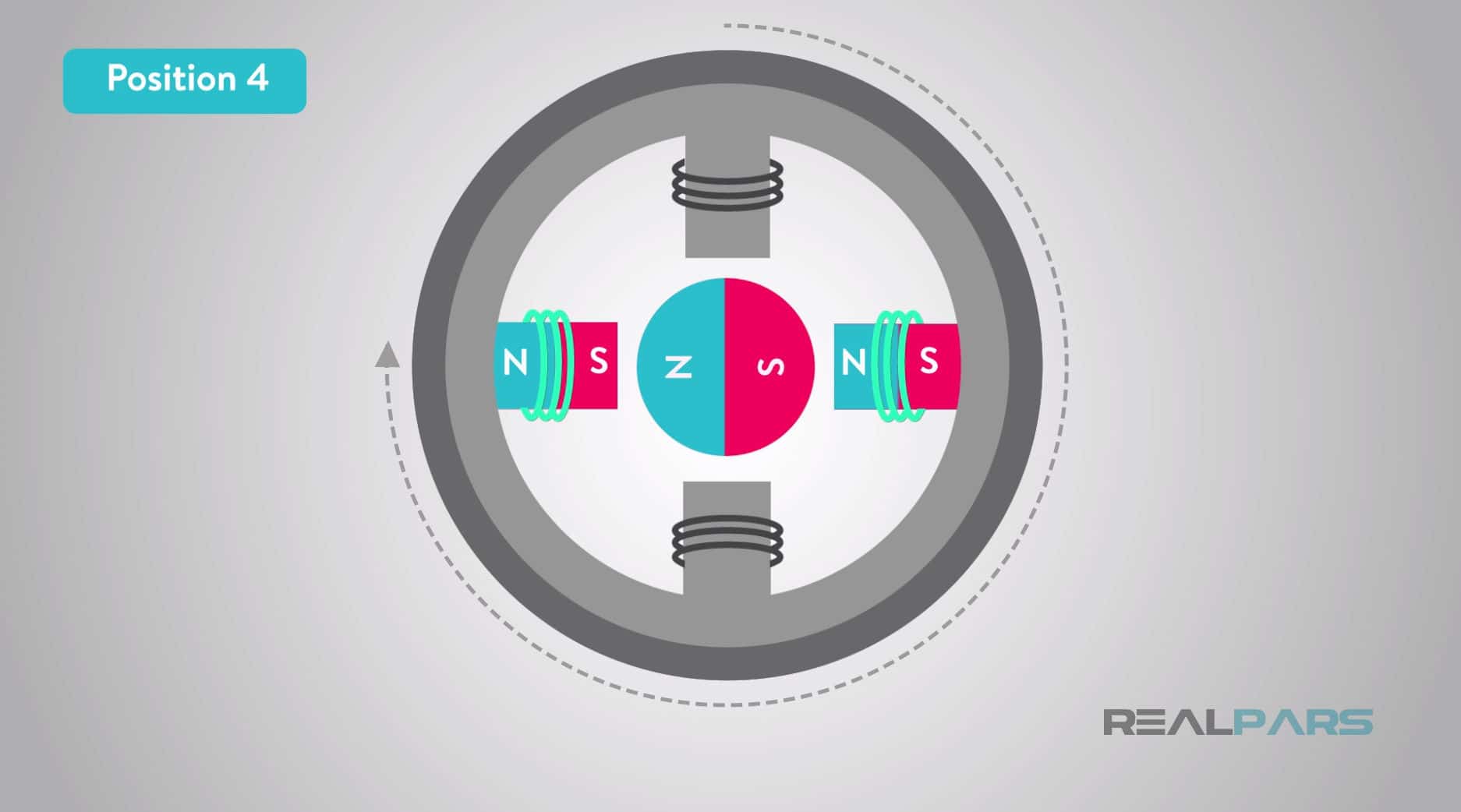
توجه: به یاد بیاورید که قطبهای همنام مغناطیسی یکدیگر را دفع و قطبهای ناهمنام یکدیگر را جذب میکردند. بنابراین با استفاده از تغییر جهت جریان عبوری از سیمپیچ قطبهاست که ما میتوانیم هر بار قطبی همنام یا غیرهمنام با روتور که یک آهنربای دائمی است ایجاد کنیم و آن را با استفاده از نیروهای جاذبه و دافعه وادار به حرکت کنیم.
البته این یک مثال ساده بود که صرفا میخواستیم به کمک آن نحوهی حرکت استپر موتور را توضیح دهیم زیرا همانطور که گفتیم در دنیای واقعی تعداد قطبهای الکترومغناطیسی موجود بر روی روتور بسیار بیشتر از دوتا میباشد چرا که ما به رزولوشنهایی بسیار بهتر و کمتر از 90 درجه نیاز داریم.
با افزایش تعداد قطبها نیز عملکرد به همین صورت است با این تفاوت که هربار به جای 90 درجه، روتور مثلا 1.8 درجه یا 0.9 درجه رو به جلو خواهد رفت.
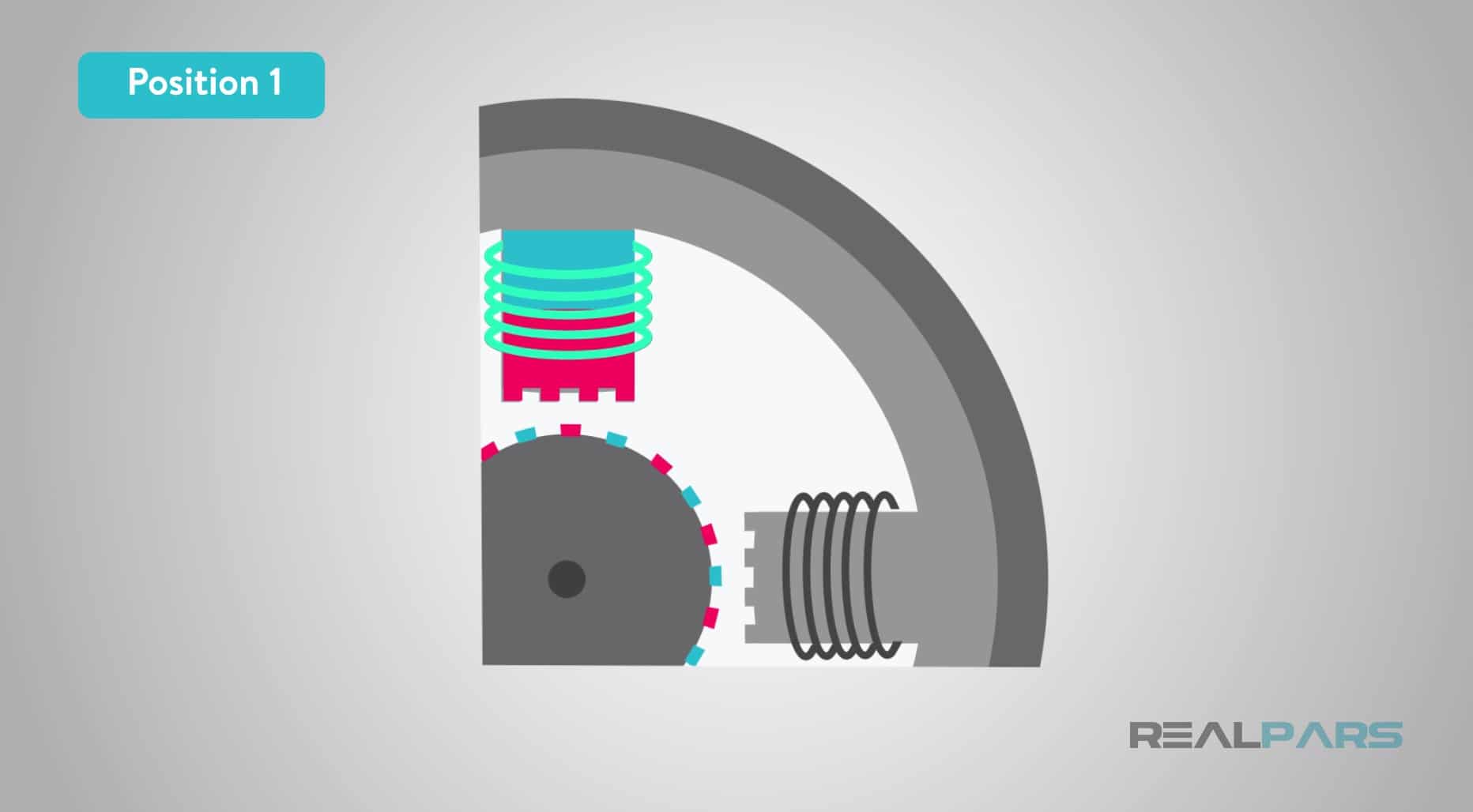
ممکن است حالتی که روتور دارای بیش از دو قطب است کمی برای شما جای سوال باشد. اجازه بدهید عملکرد این حالت را نیز با هم بررسی کنیم. به این حالت استپر موتور چند قطبی یا Multi-pole گفته میشود.
در موقعیت 1، روتور با بالاترین قطب استاتور تراز شده است. نقطهی شروع حرکتش را از آنجا در نظر میگیریم. پلاریتهی این قطب استاتور به کمک جریان عبوری به نحوی تنظیم شده است که S در مقابل روتور باشد. در موقعیت 2، جریان عبوری از سیمپیچ این قطب قطع شده و در عوض قطب سمت راست فعال میشود و S را ایجاد مینماید. به این ترتیب روتور رو به جلو حرکت میکند تا قطبهای آن با این قطب استاتور تراز شوند.
این تغییر پیوستهی قطبهای الکترومغناطیسی در نهایت یک حرکت کامل 360 درجهای را ایجاد میکند و هرچه سرعت تغییر قطبها بیشتر باشد، سرعت حرکت موتور نیز بیشتر خواهد بود.
به پایان آموزش این جلسه که در مورد استپر موتورها و نحوهی کارکرد آنها بود رسیدیم. امیدواریم اطلاعاتی که از مطالعهی این مطلب بدست آورید برای شما آنقدر مفید باشد که خودتان بتوانید پروژههایی با کنترل حرکت را راهاندازی کنید.
- منبع: ترجمه از سایت realpars.com
اگر آموزش استپر موتور چیست و چگونه کار میکند؟ براتون مفید واقع شده ما را نیز دعا کنید و اگر خواستین میتوانید از محتوای رایگان آموزشی حمایت مالی کنید. همچنین نظرات، پیشنهادات و درخواستهای خود را در کامنتها ⇓ بنویسید.
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید.