موتور پله ای نوعی ماشین الکتریکی است که محور آن به صورت گسسته حرکت دورانی دارد .این موتور ها را میتوان جزو گروه سیستم های محرکه بدون جاروبک به حساب آورد. این موتور ها پالس های الکتریکی را به حرکت مکانیکی تبدیل مکنند .
موتور های پله ای به طور روزافزون در سیستم های تثبیت یا تنظیم موقعیت حلقه باز به کار گرفته میشوند کابرد های بیشماری را میتوان برای موتور های پله ای برشمرد. از جمله کاربردهای این موتور ها دردستگاه هایی از قبیل پرینترها , دستگاهای فتوکپی , اسکنرها و… وسایلی ازاین دست همه دارای یک یا چند موتور پله ای هستند.موتور های پله ای در صنعت و ربات های صنعتی نیز کابرد فراوانی دارد برای مثال : ماشینهای تراش CNC , بازوی رباتهای صنعتی , کارت خوان ها , فلاپی درایورها و دیسکت درایورها , پلاترها, غلتکها تنها بخش کوچکی از کاربرد این موتور ها میباشدکه در تمامی این موارد از موتورهای پله ای برای کنترل موقعیت استفاده میشود . امروزه به وفور از این موتور ها در صنایع خودرو سازی و هوانوردی استفاده میشود برای مثال میتوان به دریچه ی سوخت اشاره کرد که در اتومبیل های امروزی توسط یک موتور پله ای کنترل میشود .
این موتور ها به شکل وسیعی در کاربرد های کنترلی استفاده میشوند نمونه های از کابرد آن ها در تاسیسات ساختمانی از جمله در فروشگاه ها بیمارستان ها و درب پارکینگ ها و درب اتوبوس ها و تغییر و تنظیم محل موقعیت لنز های دیجیتال و چرخش آنتن ها به مقدار مشخص و تغییر محل سر مغناطیس دیسک موارد بسیاری در اتوماسیون میباشد پس به طور کلی در هر جا که نیاز به کنترل مکانیکی دقیق داریم میتوان از موتور پله ای برای این منظور استفاده کرد.


وضعیت های پایدار در موتور های پله ای دارای فواصل مساوی از هم است و حرکت موتور ها از هر وضعیت پایدار به وضعیت پایدار بعدی یک پله نامیده میشود .
عدم نیاز به فیدبک از مزیت های موتور ها پله ای به حساب میاد . در این موتور ها فرمان لازم برای چرخش موتور به مقدار معین ودر جهت معین و با سرعت معین داده میشود. و موتور پس ازاجرای فرمان متوقف میشود. اما در موتور هایی از قبیل سروموتورها برای تثبیت موقعیت به فیدبک نیاز دارند .بدین معنی که اگرقرار باشد یک سیستم کنترل وضعیت یک محور را در زاویه خاص نگاه دارد استفاده از یک حس کننده ی موقعیت نیز اجتناب ناپذیراست. در چنین سیستمی یک “حس کننده ی موقعیت محور” موقعیت زاویه ی محور را به طور مداوم حس میکند و به تابع زاویه ی محور تبدیل میکند. این ولتاژ بایک ولتاژ که متناظر با موقعیت مورد نظر محور است مقایسه میگردد.ودرصورت مغایرت باآن ” ولتاژ خطا ” حاصل میشود. ولتاژ فوق پس از تقویت به طور مناسب به سیم پیچی کنترل یک سروموتور که با محور مورد کنترل به طور مکانیکی کوپله شده است اعمال میشود. و محور را در جهت اصلاح وضعیتش میچرخاند. بنابراین در این حالت لازم است وضعیت خروجی سیستم به طریقی در اختیار باشد تا به محض رسیدن سیستم به وضعیت مطلوب فرمان توقف سروموتور داده شود و این مستلزم فیدبک از خروجی به ورودی است .اما برخلاف موتور های سنتی موتور های پله ای تعداد معینی وضعیت پایدار در هر دور چرخش خود دارند و به تبعیت از فرمان های داده شده قادرند پس از چرخش به مقدار مورد نظر در هر یک از آنها توقف کنند و بار متصل به خود را در آن موقعیت نگه دارند . از مزایای دیگر موتور های پله ای افزایشی نبودن خطا در آنها و نیز سازگاری آنها با اکثردستگاه های دیجیتالی پیشرفته است .
موتور های پله ای دارای تعدادی سیم پیچی مجزا از هم است که تغذیه ی آنها توسط میکروکنترلر کنترل میشود. فرمان ورودی به این موتور به شکل پالسهای الکتریکی است . هر پالس تولید شده توسط مدار کنترل موتور را به اندازه ی یک پله در جهت پیشبینی شده می چرخاند.در عمل میتوان موتور را به عنوان یک “وسیله ی الکترو مکانیکی دیجیتال “در نظر گرفت که اطلاعات دیجیتال ورودی به شکل پالسهای الکتریکی را به پله های گسسته دوران محور تبدیل میکند . در کاربردهای کنترل موقعیت اگر تعداد پالس های ورودی فرستاده شده به موتور معلوم باشد میتوان موقعیت نهایی قطعه ی به حرکت درآمده را به دست آورد . لذا یک سیستم کنترل موقعیت دیجیتال که از یک موتور پله ای استفاده میکند در حالت عادی به ابزار حس کننده ی موقعیت روتور و حلقه فیدبک نیاز ندارد.
با کنترل سرعت اعمال پالس ها به موتور پله ای میتوان به سرعت های کند مثلا یک پله در زمان نسبتا زیاد تا سرعت های بالا ی 4000 دور در دقیقه البته به صورت پله ای دست یافت. موتور پله ای بسته با این که پالس هایی که به سیم پیچی های آن اعمال میشود درجهت مثلثاتی یا در خلاف جهت آن میچرخد.
پس به طور خلاصه میتوان گفت که اصلی ترین ویژگی موتور های پله ای که آن را از سایر موتورها متمایز می کند این است که میتوان محور اینگونه موتور ها را با اعمال پالس هایی مناسب الکترونیکی به صورت گسسته به حرکت درآورد ودر محل مورد نظر قرار دادو همان طور که گفته شد برای این گونه موتور ها برای چرخیدن محورشان به اندازه ی دلخواه نیازی به گرفتن فیدبک از موقعیت محورنیست .
- مزایای موتور پله ای :
- موتور های پله ای عموما نیاز به حلقه ی فید بک ندارند به همین دلیل مدار کنترل این موتور ها ساده است.
- بامدار کنترلی ساده ای به مکانیابی دقیقی میتوان دست یافت .
- به دلیل نداشتن جاروبک عمر طولانی دارند.
- دستیابی به سرعت های پایین
- معایب موتور های پله ای :
- محور موتور های سنتی به صورت پیوسته میچرخد در صورتی که موتورهای پله ای بطور گسسته میچرخد از این روی در مواردی که به سرعت پیوسته ای نیاز داشته باشیم بهتر است از موتور پله ای استفاده نکنیم .البته اگر پالس ها ی اعمالی به موتور پله ای به طور مداوم باشند موتور پله ای تقریبا پیوسته و باسرعت ثابت و متناسب با فرکانس پالس میچرخد.
- با موتور های پله ای نمیتوان به سرعت های بالا دست یافت .
- در صورت کنترل نادرست ممکن است موتور به حالت تشدید درآید. دراین حالت محورموتور به جای چرخش شروع به لرزیدن میکند.
- مقایسه موتور پله ای با موتور های سنتی :
- موتور پله ای وسیله الکترومکانیکی دیجیتالی (گسسته) است در حالی که موتور سنتی یک وسیله ی الکترومکانیکی آنالوگ (پیوسته) است . و هرکدام کاربرد خاص خود را دارا میباشد. و به هیچ وجه موتور پله ای نمیتواند به جای موتور های سنتی استفاده شود . و اگر استفاده شود کیفیت کنترلی مناسبی نخواهد داشت . ولی میتوان از موتور های سنتی به جای موتور پله ای استفاده کرد که خیلی به صرفه نخواهد بود کما اینکه سیستم کنترلی پیچیده تری نیز خواهد داشت .
- انواع موتور پله ای :
- موتور های پله ای با روتور مغناطیس شونده : دقت نسبتا خوب دارند اما گشتاور کمتری نسبت به سایر موتور پله ای ها دارند .
- موتور های پله ای مغناطیس دائم : دقت پایینی دارند اما از آنجایی که روتور این موتور ها آهنربای دائمی است شار مغناطیسی به وجود آمده در هنگام عبور از سیم پیچ افزایش می یابد. در نتیجه این گونه موتورها در مقایسه با موتورهای پله ای با روتور مغناطیس شونده ی مشابه قادر به تولید گشتاور بیشتری هستند. به عبارت دیگر قدرت بیشتری دارند.
- موتورهای پله ای هیبرید : این موتور ها شبیه به موتور های پله ای با روتور مغناطیس شونده هستند اما با دقت پله ای بهتر و نیز گشتاور و سرعت بیشتری دارا میباشند .
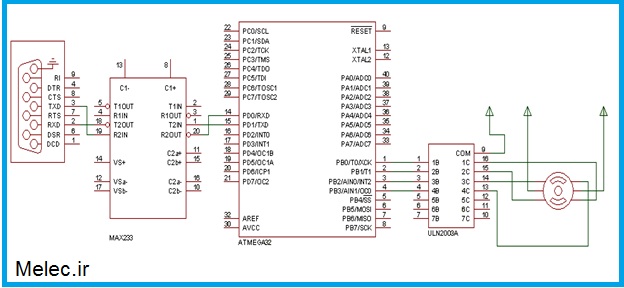
پس از آنجایی که AVR نمیتواند جریان لازم برای راه اندازی موتور پله ای را فراهم کند باید از راه اندازی مانند ULN2003 برای فرمان دادن به استاتور استفاده کنیم . توجه کنید که میتوان از چند ترانزیستور بعنوان راه انداز استفاده کنیم . که در این صورت باید از دیود برای مراقبت از جریان القایی در هنگام قطع سیم پیچ بکار برد . اما داخل ULN2003 هفت زوج ترانزیستور BJT از نوع دارلینگتون وجود دارد که دارای دیود داخلی برای مقابله با EMF برگشتی میباشد. هر دارلینگتون توانایی جریان دهی تا 500mA را دارا میباشد .
مراحل راه ندازی و اتصال AVR به موتور پله ای :
- ابتدا با استفاده یک اهم متر مقاومت سیم ها را اندازه میگیریم. دلیل این کار این است که باید تعیین کنیم که کدام سیم مشترک (COM) به کدام سیم پیچ وصل است. همانطور که میدانید مقاومت بین زوج سیم های A – A’ و B – B’ محدود بوده که این مقاومت بستگی به نوع موتور دارد.(به عنوان مثال 200 اهم). اما مقاومت بین هر کدام از سیم پیچ های A ,B بینهایت است .هم چنین توجه دارید که مقاومت بین سرمشترک و هریک از فازهای A , B نصف مقاومت بین دو سر فاز است.
- سیم های مشترک را به تغذیه مثبت موتور وصل می کنیم.
- چهار سیم مربوط به سیم پیچ های استاتور رابا استفاده از ULN2003 به چهار بیت از پورتهای میکروکنترلر وصل میکنیم.
نحوه ی اتصال میکروکنترلر AVR به کامپیوتر :
AVR بلوکی به اسم USART دارد و کامپیوتر ها نیز مجهز به واحد مشابهی نام UART میباشند.که تفاوتشان در این است که UART برخلافUSART تنها قابلیت ارتباط به صورت غیر همزمان رادارد. بنابراین میکروکنترلر AVR از این طریق میتواند با کامپیوتر تبادل داده داشته باشند.کامپیوتر ها برای تبادل داده از طریق UART خود با دنیای خارج از استاندارد RS232 بهره میبرند. RS232 یک استاندارد است که درآن مشخصات فیزیکی ارتباط مانند سطح ولتاژ نوع کانکتور رفتار اتصال کوتاه و غیره تعریف میشود.
یکی از ویژگی های RS232 که در ارتباط PC با میکروکنترلر اهمیت دارد سطح ولتاژ آن است. ولتاژ خط RS232 در حالت صفر و یک منطقی با TTL متفاوت است .در واقع سطح منطقی RS232 به صورت زیر است :
صفر منطقی : -3 تا -15 ولت تلقی میشود.
یک منطقی : +3 تا +15 ولت تلقی میشود.
و بین -3 تا +3 نامعین است.
از این روی وسیله ی گیرنده بایستی توانایی تحمل ولتاژ اعمال شده از -25 ولت تا +25 ولت را داشته باشد. بنابراین از آن جایی که میکروکنترلر توانایی کار با این سطح ولتاژ را ندارد برای ارتباط دهی پورت سریال PC با میکروکنترلر نیاز به یک مبدل ولتاژ است. در این پروژه از MAX 233 استفاده شده است .این IC شامل دو مبدل مجزا است.
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید و همچنین میتوانید اپلیکیشن اندرویدی آموزش الکترونیک را هم نصب کنید.



برنامه نویسی میکرو کنترو لر ARM با labview در صورت همکاری لطفا با من تماس بگیرید ممنون میشم
چیت مورد استفاده در این برد میکرو کنترلر ARM_STM32F103ZET6 میباشد که مهمترین تفاوت اصلی این برد با دیگر برد های پروگرم و کامپایلر برنامه ها در نرم افزار قدرتمند LABVIEW میباشد . که با نصب یک تولکیت اصلی در خود برنامه LABVIEW به راحتی میتوانید تمامی برنامه های مورد استفاده در LABVIEW را مستقیما به درون این میکرو پروگرم کنید .
از قابلیت های نرم افزاری این سیستم میتوان از یک لایبری بسیار قدرتمند که مخصوص سری STM32 میباشد را نام برد که میتواند به راحتی در نرم افزار لب ویو با تمامی سخت افزار های موجود در برد به راحتی ارتباط بر قرار کند .
و همچنین خصوصیات کلی این برد شامل موارد زیر میباشد :
1- خروجی ال سی دی 40 پین استاندارد به همراه تاچ
2- دارای ای سی پروتکل RS485
3- دارای دو پورت سریال بصورت TTL و RS232 توسط ای سی PL2303HX
4- دارای یک پورت CAN با چیپ TJA1050T
5- دارای پورت شبکه با ای سی ENC28J60
6- دارای کلید ریست
7- دارای دو پورت یو اس بی او تی جی و هاست و دیوایس
8- دارای چهار عدد LED برای نمایش
9- دارای چهار عدد کلید قطع و وصل برای کنترل
10- دارای سوکت باتری بک اپ و کریستال ساعت
11- فرکانس کاری 72 مگاهرتز
12- دارای یک SDRAM به ظرفیت 256Mb
13- تغذیه از منبع 5 ولت خارجی یا سوکت یو اس بی بروی برد
14- دارای یک ای سی سنسور شتاب
15- کار باپورتهای ميکروکنترلر (GPIO)
16- کار با واحد وقفه (INTERRUPT)
17- کار با پورتهای سریال ميکروکنترلر (USART)
18- کار با پورتهای سریال ميکروکنترلر RS232-RS485
19- کار با واحد گذرگاه ارتباط جانبی سریال (SPI)
20- کاربا حافظه جانبی (EEPROM)
21- کاربا واحد تایمر زمان واقعی (RTC)
22- کاربا واحد تایمر زمان واقعی (RTC)
23- کار با تایمرهای ميکروکنترلر (TIMER)
24- کارباواحدمدولاسيون عرض پالس (PWM)
25- کارمبدل آنالوگ به دیجيتال (ADC)
26- کارباسنسور دما(LM35)
27- کارباواحد دیجيتال به آنالوگ (DAC)
28- ارتباط شبکه باماژول(ENC28J60)
29- ارتباط (CAN)
30- ارتباط با (SD Card)
31- ارتباط USB Host))
32- ارتباط USBبه وسيله تراشه (PL 2303)
33- ارتباط با (Inferred)
34- ارتباط رادیوFM
35- ارتباط با mp3 player
36- ارتباط با Encoder
در ضمن تمامی این امکانات از طریق نرم افزار LABVIEW به صورت مستقیم به میکرو وارد میشود