هر لحظهای از زندگیتان را که تصور کنید، شما در مجاورت حداقل یک یا دو نوع از انواع موتورهای الکتریکی قرار دارید. از موتور تولید ویبره در گوشی تلفنهمراهتان بگیرید تا فنها و cd درایو هایی که در کنسولهای بازی قرار دارند. تقریبا میتوان گفت که زندگی ما محصور در میان انواع موتورهای الکتریکی است.
موتورها در واقع واسطهای برای برقراری تعامل میان ابزارهای مورد استفاده ما، ما و جهان اطرافمان هستند و با توجه به کثرت کاربردهایی که دارند، طراحی و عملکرد آنها نیز بسیار متفاوت است.

در این آموزش به دنبال چه هستیم؟
میخواهیم تعدادی از انواع سادهی موتورها را معرفی کنیم و با کاربردهای آنها آشنا شویم:

- موتور براش(جاروبکدار) DC
- موتور براشلس ( بدون جاروبک) DC
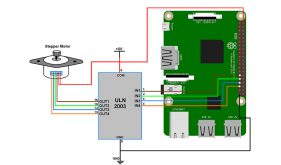
- موتور استپر (پلهای)
- موتور خطی
پیشنهاداتی برای پیشمطالعه
پیشنهاد میکنیم که چنانچه با مفاهیم ابتدایی الکترونیک آشنایی ندارید و یا به منظور یادآوری مجدد؛ قبل از شروع مطالعهی این آموزش مروری بر مفاهیم زیر داشته باشید:
- الکتریسیته چیست؟
- مدار الکترونیکی چیست؟
- ولتاژ، جریان
- مقاومت، قانون اهم
چه چیزی یک موتور را به حرکت وا میدارد؟
یک پاسخ کلی و ساده وجود دارد: نیروی مغناطیسی!
حالا بیایید قدری دقیقتر بررسی کنیم و ببینیم که این نیروی مرموز چطور یک ماشین آخرینسیستم را به حرکت درمیآورد.

خب! دنیایی از مفاهیم پیچیده در اینجا در کار هستند اما نگران نباشید، ما برای حفظ سادگی و راحتی فهم شما، از جزییات گیج کننده پرهیز میکنیم و تلاش میکنیم که برخی از این مفاهیم ضروری را با کمک توضیح یک سری آزمایش تجربی جا بیندازیم. با این حال اگر علاقهمند بودید یا نیاز به دانستن جزییات بیشتری داشتید، میتوانید به کتابها مراجع کنید.
نکته دیگر اینکه ما برای توضیح این مفاهیم از ابتدا فرض را بر این میگذاریم که یک میدان مغناطیسی بر اثر حرکت الکترونها – یا همان جریان الکتریکی- ایجاد میشود. یعنی مطابق نظریهی کلاسیک. اما باید بدانید که اگرقرار باشد از نظریات کلاسیک عبور کنیم و به سطح اتمها قدم بگذاریم نظریات مغناطیسی قدری متفاوت خواهند بود.
میدان الکترومغناطیسی
برای تولید یک آهنربا یا یک میدان مغناطیسی؛ ابتدا باید ببینیم که آنها چگونه ساخته میشوند. رابطه میدان میدان الکترومغناطیسی و جریان براساس قانون دست راست رفتار میکند. براساس این قانون زمانی که جریانی از یک سیم عبور میکند، در اطراف این سیم میدانی مغناطیسی ایجاد میشود که جهت آن در جهت حرکت انگشتان دست راست شما به دور سیم است ( در حالتی که انگشت شست شما در راستای جریان عبوری از سیم باشد.) این قانون براساس قانون آمپر در مورد سیمهای حامل جریان الکتریکی بدست میآید.
حال تصور کنید که همان سیم حامل جریان را در یک میدان مغناطیسی که از قبل ایجاد کردهایم قرار دهیم. این کار موجب تولید نیرویی میشود که آن را نیروی لورنتز مینامند.
کپشن تصویر: قانون دستراست که نشان دهنده جهت میدان مغناطیسی تولید شده در اطراف یک سیم حامل جریان براساس جهت جریان عبوری است
اگر شدت جریان افزایش پیدا کند، قدرت میدان نیاز افزایش خواهد یافت. بنابراین برای اینکه بتوانیم با این میدان تولید شده کار بدرد بخوری انجام دهیم، لازم است ابتدا به فکر تامین مقادیر معتنابهی جریان باشیم! اما آیا امکانپذیر است؟
از طرف دیگر، میدانی که یک سیم صاف حامل جریان تولید میکند در همهی نقاط آن یکسان است ( چون توزیع جریان در آن یکسان است) و این میدان های تولید شده در نقاط مختلف در امتداد سیم ، میدانهای غیرمتمرکز و غیرقابل کنترل هستند. حالا تصور کنید که همین سیم را خم کنیم و آن را به شکل یک حلقه درآوریم ( مانند تصویر زیر). اکنون میدانی متمرکز، مستقیم و یکجهت خواهیم داشت که به مراتب قدرت بیشتری دارد.
کپشن تصویر: همانطور که میبینید، میدان تولید شده توسط سیم ماهیتا تغییری نکرده است، فقط با خم کردن سیم و به شکل حلقه درآوردن آن، میدان های کوچک تولید شده در یک راستا قرار گرفته و میدان قوی تری ساخته اند.
الکترومگنتها یا آهنرباهای الکترومغناطیسی
دیدیم که اگر یک سیم حامل جریان را به شکل حلقه درآوریم، یک میدان مغناطیسی متمرکز و قویتر خواهیم داشت. حالا تصور کنید که به جای یک حلقه، از صدها حلقه در کنار هم استفاده کنیم! حتما میتوانید پیشبینی کنید که برای یک جریان ثابت؛ هرچه تعداد حلقهها را افزایش دهیم احتمالا میدان قویتری خواهیم داشت. و حالا که چنین مشاهدهای داریم، چرا تعداد حلقهها را به صدها و میلیونها حلقه در سیمپیچها و موتورهای الکترومغناطیسی افزایش ندهیم؟ به این ترتیب بدون نیاز به تولید جریانهای بالا؛ میدانهایی خواهیم داشت که به اندازه نیازمان قدرتمند باشند.
اما ماجرا به همین سادگی خاتمه نمییابد! برای افزایش تعداد حلقهها بدیهیست که باید طول سیم حامل جریان را بلندتر بگیریم و براساس قوانین فیزیکی ، هرچه طول سیم بلندتر باشد، مقاومت الکتریکی آن نیز بالاتر خواهد بود. از دیگر سو قانون اهم ( V=R*I) میگوید که اگر بخواهیم جریان ثابت بماند؛ با افزایش مقاومت باید ولتاژ نیز افزایش پیدا کند. افزایش ولتاژ در برخی کاربردها قابل اعمال است و مشکلی ایجاد نمیکند. اما در برخی کاربردهای دیگر ترجیح میدهند که به جای افزایش بیرویه ولتاژ؛ از سیمپیچهای بزرگتر ( با سطح مقطع بیشتر) استفاده کنند که مقاومت آن کمتر باشد. هرچند که این سیمپیچهای بزرگتر نیز قیمت بالاتری دارند و کارکردن با آنها نیز دشوارتر است.
تمام اینها چالشها و عواملی هستند که در طراحی یک موتور باید مدنظر قرار گرفته و با توجه به نوع موتور و کارکرد آن؛ میان آنها مصالحه ایجاد شود.
کپشن تصویر: یک آهنربای الکترومغناطیسی در حال تولید میدان تقویت شده.
آزمایش عملی!
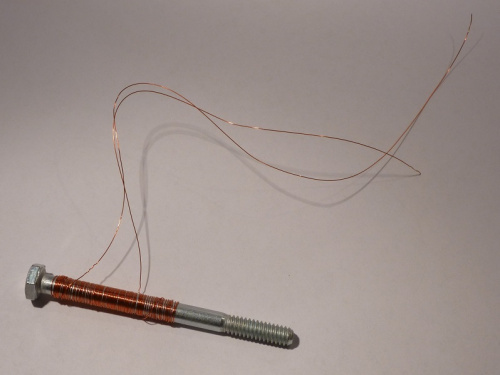
بیابید که برای آزمایش دانستههای تئوریمان تا این لحظه؛ یک آزمایش عملی راه بیندازیم. میخواهیم با کمک هم یک سیملوله الکترومغناطیسی یا همان الکترومگنت بسازیم. برای این کار کافیست یک پیچ یا میخ بلند پیدا کنید ( یا هر وسیله باریک و استوانهای دیگر که فلزی باشد.)، مقداری سیملاکی و یک باتری.
توجه: باتریهای لیتیومی در این آزمایش بخوبی جواب نمیدهند؛ پس بهتر است از این نوع استفاده نکنید.
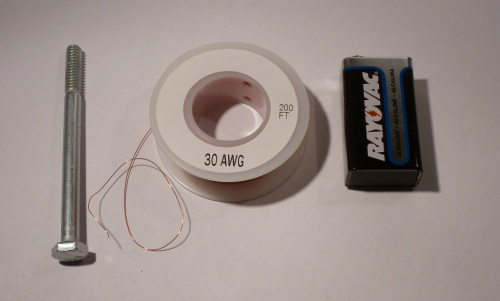
ابتدا بین 75 تا 100 از سیم لاکی را دور میخ بپیچید. همینجا این توضیح را اضافه کنیم که استفاده از یک هستهی فلزی درون سیمپیچ باعث تقویت میدان شده و شدت موثر آن را افزایش میدهد ( علت آن را در بخش بعدی توضیح میدهیم.)؛ به همین علت از آن استفاده میکنیم.
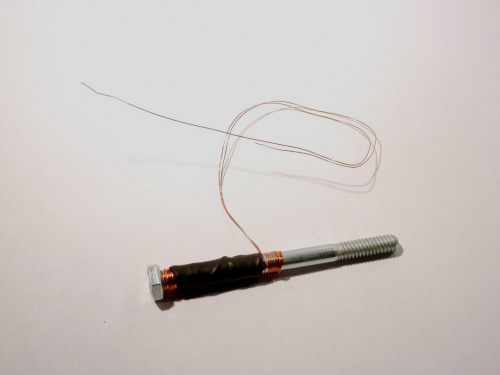
کپشن تصویر: با کمک مقداری چسب میتوانید حلقهها را بر روی هسته فیکس کنید.
حالا با کمک یک سمباده، مقدار از عایق نارسانای سیم را در دو سر انتهایی آن کنار بزنید ( دو سر سیم را لخت کنید.) و هر کدام از این دو سر را به یکی از ترمینالهای باتری اتصال دهید. تمام شد! حالا شما سنگبنای یک موتور الکتریکی را به خوبی گذاشتهاید! برای آزمایش کردن میزان قدرت میدان ایجاد شده، تلاش کنید به کمک این آهنربای الکترومغناطیسی ساخته شده، اشیا فلزی سبک و مختلفی را بردارید.
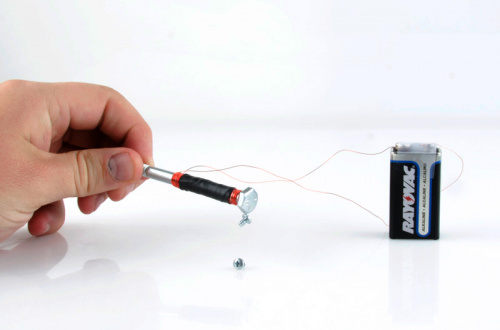
کپشن تصویر. این جادو نیست! این فقط قدرت علم است!
فرومغناطیس
بیاید به اول توضیحاتمان برگردیم. گفتیم که میدان مغناطیسی بر اثر عبور جریان از سیمها ایجاد میشود. حالا اگر تعریف جریان را در نظر بگیریم؛ یعنی حرکت الکترونها؛ میتوان این طور نتیجهگیری کرد که حرکت الکترون به دور هسته عامل تولید جریان و در نتیجه میدان مغناطیسی است.
و اگر در نظر بگیریم که تمام اتمهای تمام موجودات الکترون متحرک دارند؛ پس آیا میتوان به طور شگفتآوری نتیجهگرفت که تمام موجودات خاصیت آهنربایی و مغناطیسی دارند؟؟
پاسخ مثبت است! هرچیزی در این عالم ؛ حتی قورباغهها! اگر به اندازهی کافی نیروی محرکه دریافت کنند؛ از خود خاصیت الکترومغناطیسی بروز خواهند داد. هرچند که شدت این خاصیت در اجسام مختلف متفاوت است. علت اینکه ما میتوانیم پیچهای فلزی را با یکی از مگنتهای تزیینی روی در یخچال بلند کنیم، اما نمیتوانیم آنها را با یک قورباغه بلند کنیم، به علت تفاوت در ویژگی فرومغناطیسی و پارامغناطیسی است. برای اینکه تفاوت این دو خاصیت ( و نیز چند مفهوم دیگر) را متوجه شویم سری به مکانیک کوانتومی میزنیم…
برای توضیح، بر روی خاصیت فرومغناطیسی تمرکز میکنیم چرا که با آن بیش از سایر خواص سروکار داریم و فهم آن مبنای فهم بقیه خواهد شد. ضمنا؛ بدون آنکه در مفاهیم پیچیده کوانتومی درگیر شویم؛ این را به صورت یک اصل اولیه میپذیریم که تمام اتمهای موادی که خاصیت الکترومغناطیسی دارند، تمایل دارند که میدان مغناطیسیشان را با میدانهای مغناطیسی اتمهای مجاور همجهت کنند. به علت وجود همین تمایل، ناپیوستگیهایی که در ساختار مواد وجود دارد و نیز عواملی مانند ساختارهای کریستالی، چیزی که در نهایت خواهیم داشت، یک سری دامنههای مغناطیسی است که جهت میدان تمام اتمها درون هر دامنه یکسان، و با اتمهای دامنههای دیگر متفاوت است.
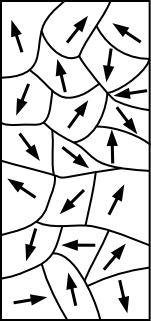
در حالت عادی یک ماده، این دامنهها که جهتهای مخالف هم دارند، بر هم اثر گذاشته و یکدیگر را یا خنثی کرده یا بسیار تضعیف میکنند. به این ترتیب ماده خاصیت مغناطیسی از خود بروز نمیدهد. اما در حالتیکه همان ماده را در معرض یک میدان خارجی قوی قرار دهیم، تحت تاثیر این میدان خارجی قوی؛ تمام میدانهای دامنههای داخلی همجهت شده و در راستای جهت همین میدان قرار میگیرند. به این ترتیب، میدانی که در مجموع حاصل میشود میدانی قوی است که ماده را دارای خاصیت مغناطیسی میکند.
همراستایی جهت دامنههای داخلی تحت تاثیر یک میدان خارجی، بسته به قدرت و شدت این میدان بیرونی میتواند به صورت دائمی ایجاد شود. اگر مادهای به صورت دائمی دارای خاصیت آهنربایی شود؛ در این صورت کاربردهای خوبی میتوانیم از آن داشته باشیم که در قسمت بعدی در مورد آن توضیح میدهیم.
خاصیت آهنربایی دائمی
این اجسام دقیقا مشابه الکترومگنتها رفتار میکنند و تنها تفاوت این است که این خاصیت در آنها همیشگی است ( نیازمند اعمال نیروی خارجی نیست.)
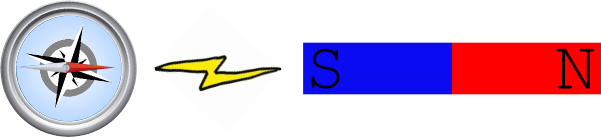
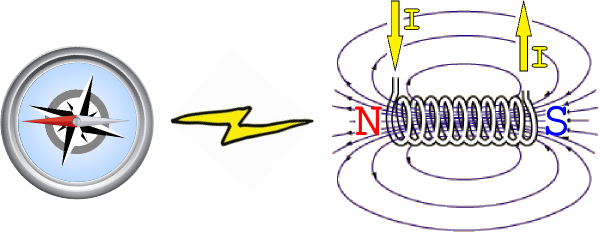
اگر دقت کرده باشید، در تمام تصاویر نشان داده شده، فلشهایی که جهت میدانها را مشخص میکنند همواره از قطب N خارج شده و به قطب S وارد میشوند. این جهت به عنوان جهت قراردادی میدان شناخته میشود. همچنین قرارداد دیگری که در مورد مشخص نمودن قطبهای مغناطیسی وجود دارد این است که قطب N را با رنگ قرمز، و قطب S را با رنگ آبی نمایش میدهند. برای مشخص کردن این قطبها در هر جسمی، میتوان از یک قطبنما کمک گرفت؛ به این ترتیب که از آنجا که قطبهای مخالف یکدیگر را جذب میکنند؛ سر قرمز رنگ عقربه قطب نما جذب قطب S جسم مورد نظر شده و سر دیگر آن در دورترین فاصله از قطب N قرار میگیرد (تصویر زیر را ببینید.)
با کمک یک قطب نما و با همین روش فوق میتوانید قطبهای میدان در یک الکترومگنت را هم مشخص کنید.
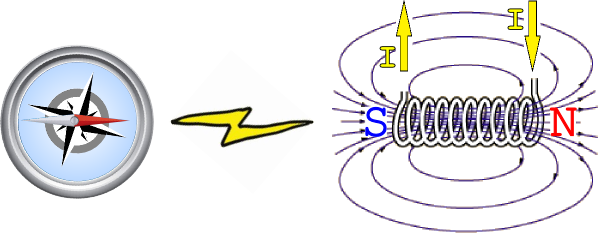
و اگر جهت جریان عبوری از سیملوله را برعکس کنید، خواهید دید که جهت میدان الکترومغناطیسی تولید شده نیز دقیقا برعکس خواهد شد!
این مفاهیم از اصول بنیادین در ساخت موتورها محسوب میشوند. حالا نوبت این است که در ادامه این آموزش به سراغ برخی از انواع موتورها برویم و ببینیم که مفاهیم نیروهای مغناطیسی و الکترومگنت ها چگونه در آنها به کار گرفته شده اند.
موتور براش DC – یک موتور کلاسیک!

این موتور یکی از انواع موتورهای بسیار سادهای است که امروزه مورد استفاده قرار میگیرد و حتما در دور و اطرافتان نمونههایی از آن را میتوانید پیدا کنید؛ به عنوان مثال در لوازم خانگی برقی، اسباببازیها، خودروها و … . سادگی این نوع موتور در مراحل ساخت و نیز سادگی کنترل آن، آن را تبدیل به راهحلی برای پاسخگویی به نیازهای حرفهای و کاربردهای سرگرمی کرده است.
ساختمان یک موتور براش

برای فهم کامل ساختار این موتورها، یک موتور براش DC ساده است، از هم باز میکنیم و قطعات داخل آن را با هم بررسی میکنیم. همانطور که در تصویر زیر میبینید، با ساختاری ساده مواجه هستیم که تنها با در دست داشتن چند قطعه کاربردی ساخته میشود.
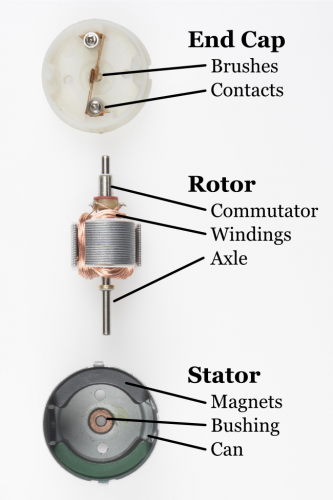
- جاروبکها (براشها) – به منظور انتقال توان از کنتاکتها به آرمیچر از طریق کموتاتور.
- کنتاکتها – توان الکتریکی را از کنترلر به جاروبکها منتقل میکنند.
- کموتاتور – انتقال توان به سیمپیچها در حین چرخش آرمیچر.
- سیمپیجها – مبدل جریان الکتریکی به میدان مغناطیسی که عامل گرداندن محور موتور خواهد شد.
- محور – انتقال توان مکانیکی ( نیرو محرکه) ایجاد شده در موتور به محل کاربرد مورد نظر.
- مگنتها – فراهم کننده یک میدان مغناطیسی برای سیمپیچها که باعث جذب و دفع آنها( در نتیجه به گردش در آمدن آنها) میشود.
- بوشینگ موتور – موجب کاهش اصطکاک محور میشود.
- جعبه یا بدنه – نوعی پوشش مکانیکی برای موتور فراهم میکنند.
نحوه عملکرد
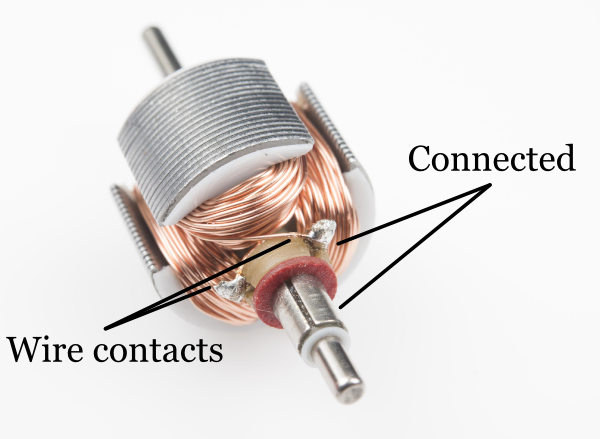
زمانی که نیروی محرکه به سیمپیچها منتقل میشود، نیروی مغناطیسی تولید شده آنها را جذب مگنتهای قرار گرفته در موتور میکند. این عمل موجب گردش موتور میشود تا زمانی که جاروبکها با کنتاکتهای جدیدی از کموتاتورهای اتصال پیدا کنند. این کنتاکتهای جدید موجب انتقال نیروی محرکه به بخش دیگری از سیمپیچ میشوند و این بار این حلقهها موتور را به گردش درمیآورند. برای معکوس کردن جهت حرکت موتور نیز کافیست پلاریته متصل شده به کنتاکتها را معکوس کنیم( تا جهت جریان معکوس شود و …) . جرقههایی که تولید میشوند نتیجه جهشهای متوالی در اتصال جاروبکها به کنتاکتها مختلف است که از یک کنتاکت به کنتاکت بعدی میروند. دقت داریم که هر بخشی از سیمپیچ به دو تا از نزدیکترین کنتاکتهای کموتاتور متصل است.
در ساختار این نوع موتورها همیشه از تعداد فردی سیمپیچ استفاده میکنند که از قفل شدن آن در یک حالت ثابت جلوگیری کنند. در موتورهای بزرگتر نیز معمولا تعداد این سیمپیچها را بالا میبرند تا موتور به صورت دندانهدار و پرشی حرکت نکند و در RPM های پایین نیز حرکتی پیوسته و نرم داشته باشد. اگر میخواهید منظور از حرکت پرشی و دندانه دار را بهتر موجه شوید کافیست سعی کنید محور موتور را با دست خودتان بگردانید. روشهای مختلفی برای خلاصی از این مشکل وجود دارند که یکی از پرکاربردترین آنها حذف کامل استاتور است. از چنین موتورهایی به عنوان موتورهای بدون هسته یاد میشود.
نقاط قوت موتورهای براش
- سادگی کنترل
- گشتاور عالی در RPM های پایین
- تولید به صورت انبوه با قیمت پایین
نقاط ضعف موتورهای براش
- امکان فرسودگی جاروبکها در طولانیمدت.
- ایجاد انحنا در جاروبکها در طولانی مدت موجب تولید نویز الکترومغناطیسی میشود.
- معمولا سرعت آنها محدود است چرا که جاروبکها پس از مدتی کار گرم میشوند.
موتور براشلس (بدون جاروبک) – به مراتب قدرتمندتر!
میتوانیم بگوییم که موتورهای بدون جاروبک تقریبا تمام بازار را دست خودشان گرفتهاند!
و البته شاید جمله بالا قدری مبالغهآمیز باشد اما با این حال واقعیت این است که موتورهای براشلس بر بخش وسیعی از بازار تولید هواپیماها و قطارهای سرگرمی چیرگی دارند. تا پیش از فراگیر و ارزان شدن میکروکنترلرها، کنترل این نوع موتورها کار دشواری محسوب میشد اما با وجود آنها اکنون اصلا کار سختی نیست. هرچند که هنوز امکان بهبود از نظر سرعت و بهرهوری در آنها وجود دارد تا زمانی که حداکثر قابلیتهای شگفتانگیز خود را بروز دهند . عدم حضور جاروبکها باعث میشود که این نوع موتورها در مقایسه با موتورهای براش توان بیشتری تولید کنند و در حین فعالیت نیز سروصدای بسیار کمتری تولید کنند.
امروزه بسیاری از ابزارهای به روز و ماشینهای مختلف، به سمت استفاده از موتورهای براشلس سوق یافتهاند. یکی از نمونههای برجسته استفاده در خودروهای تسلا است.
ساختار موتورهای براشلس
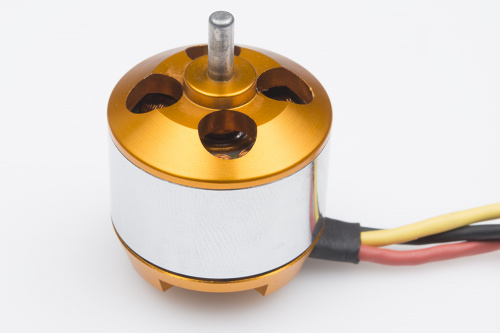
خب، بهترین راه برای فهم ساختار آنها، این است که یکی از نمونههای سادهشان را کالبدشکافی کنیم. این مدل معمولا در هواپیماهای کنترل از راه دور و یا هلیکوپترها استفاده میشود.
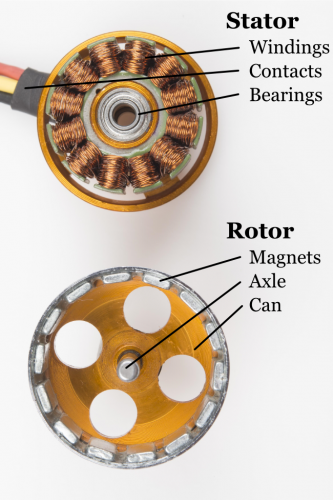
- سیمپیچها – مبدل جریان الکتریکی به میدان مغناطیسی که عامل گرداندن روتور خواهد شد.
- کنتاکتها – توان الکتریکی را از کنترلر به سیمپیچها منتقل میکنند.
- یاتاقانها – وظیفهشان کاهش اصطکاک محور موتور است.
- مگنتها –یک میدان مغناطیسی فراهم میکنند که باعث جذب و دفع سیمپیچها و در نتیجه به حرکت در آمدن آنها میشود.
- محور – منتقل کننده توان مکانیکی ( نیرو محرکه) ایجاد شده در موتور به محل کاربرد مورد نظر.
نحوه عملکرد
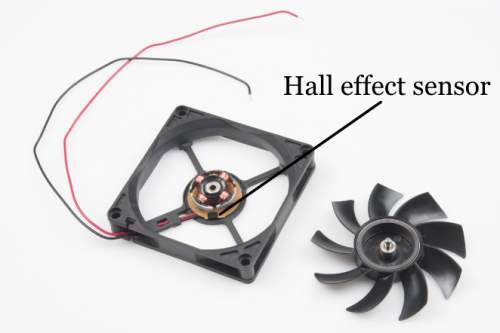
هرچند دور از ذهن، اما مکانیزم عملکرد موتورهای براش بسیار ساده است. تنها بخش متحرک در آنها روتر است که مگنتها را در درون خود دارد. تنها بخش شاید کمی پیچیده، این است که چگونه ترتیب اعمال نیرومحرکه به سیمپیچها را با حرکت روتر هماهنگ کنیم. میدانیم که پلاریته هر سیمپیچ، توسط جهت جریان عبوری از آن تعیین میشود و معکوس کردن جهت جریان جهت پلاریته را هم عوض میکند. بنابراین در صورت استفاده از یک جریان متناوب هر سیمپیچ دچار رانشهای رو به جلو و عقب به صورت متوالی میشود. ترفندی که برای هماهنگ شدن در اینجا به کار میبرند این است که سعی کنند تکرار الگوی این رانشها را با سرعت چرخش روتر هماهنگ کنند. اما چگونه؟ دو روش متداول وجود دارد. روش اول به این ترتیب است که ولتاژ دو سر سیمپیچی که نیرومحرکه به آن اعمال نشده است را اندازه میگیرند. این روش در سرعتهای بالای روتر بسیار خوب جواب میدهد چرا که با کاهش سرعت چرخش موتور، ولتاژ تولید شده نیز کاهش مییابد و در نتیجه اندازهگیری آن کار به مراتب دشوارتر و پرخطاتری خواهد بود. اما در روش دوم که در کاربردهای صنعتی از آن بهره گرفته میشود، از سنسورهای اثر هال استفاده میشود که موقعیت دقیق مگنتها به کمک انها تعیین شود. این روش از اصلیترین روشهایی است که در کنترل موتور فن کامپیوترها استفاده میشود.
نقاط قوت موتورهای براشلس
- قابلیت اطمینان بالا
- سرعت بالاتر
- بهرهوری بیشتر
- دارای تولید انبوه و دردسترس
نقاط ضعف موتورهای براشلس
- کنترل آنها بدون وجود کنترلرهای پیشرفته – مثلا میکروکنترلر- سخت است.
- برای شروع به کار نیاز به وجود مقدار اندکی بار اولیه دارند.
- در صورتی که در کاربردهایی نظیر خودرو ها باشند، نیاز به گیربکسهایی مخصوص دارند.
موتورهای پله ای ( استپ موتورز ) – دقت در عین سادگی
موتورهای استپر یکی از بهترین انواع موتورها در کنترل موقعیت هستند. از آنها در پرینترهای رومیزی، پلاترها، پرینترهای سهبعدی، دستگاههای فرز CNC و هر ماشین یا ابزار دیگری که در آن نیاز به کنترل موقعیت دقیق وجود داشته باشد، استفاده میکنند. موتورهای استپر در واقع یکی از زیرشاخههای موتورهای براشلس محسوب میشوند و طراحی و ساخت آنها به منظور استفاده در کاربردهایی صورت گرفت که به گشتاور بالا نیاز داشتند. گشتاور بالا این امکان را فراهم میکند که بتوانیم به شیوهای بدون خلل از یک سطح به سطح بعدی برویم و در نتیجه بتوانیم یک سیستم تعیین موقعیت ساده داشته باشیم که بدون نیاز به حضور انکودرها بدرستی برای ما کار میکند. به همین علت کنترلر های موتورهای استپر بسیار ساده هستند؛ چه از لحاظ طراحی و چه از لحاظ ساخت.
ساختار موتورهای پلهای
خب، مشابه دو دسته قبلی، برای فهم ساختار یک استپ موتور نیز، به سراغ کالبدشکافی یکی از انواع ساده آنها میپردازیم. همانطور که در تصویر زیر میبینید، این موتورهای از چند جزء اصلی ساخته شدهاند:
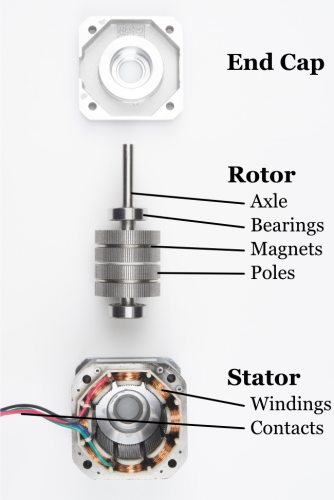
- محور – منتقل کننده توان مکانیکی ( نیرو محرکه) ایجاد شده در موتور به محل کاربرد مورد نظر.
- یاتاقانها – وظیفهشان کاهش اصطکاک محور موتور است.
- مگنتها – یک میدان مغناطیسی فراهم میکنند که باعث جذب و دفع سیمپیچها و در نتیجه به حرکت در آمدن آنها میشود.
- قطبها – افزایش رزولوشن و دقت فاصله میان استپها؛ از طریق متمرکز نمودن قدرت میدان مغناطیسی
- سیمپیچها – مبدل جریان الکتریکی به میدان مغناطیسی که عامل گرداندن روتور خواهد شد.
- کنتاکتها – توان الکتریکی را از کنترلر به سیمپیچها منتقل میکنند.
نحوه عملکرد
استپ موتور از آنجا که از خانواده موتورهای براشلس و زیرمجموعه آنهاست، شیوه عملکرد آن نیز دقیقا مشابه موتورهای براشلس است با این تفاوت که فاصله میان استپ ها بسیار کوچکتر است. تنها عضو متحرک در آنها روتر است که مگنتها را در درون خود دارد. پیچیدگی از آنجا آغاز میشود که ترتیب اعمال نیرومحرکه به سیمپیچها چگونه باشد که الگوی تغییرات آنها با حرکت روتر هماهنگ شود. میدانیم که پلاریته هر سیمپیچ، توسط جهت جریان عبوری از آن تعیین میشود و معکوس کردن جهت جریان جهت پلاریته را هم عوض میکند. بنابراین در صورت استفاده از یک جریان متناوب هر سیمپیچ دچار رانشهای رو به جلو و عقب به صورت متوالی میشود. نکتهای که استپرها را از موتورهای براشلس عمومی تمایز میدهد این است که ساختار قرارگیری مگنتها در موتورهای استپر متفاوت است. معمولا رسیدن به آرایهی درستی از مگنتها که بتواند در مقیاس کوچک ( فواصل کم مگنتها نسبت به هم) به خوبی عمل کند، قدری دشوار و البته گران است. اما برای تقریب به مفهوم مدنظر، اغلب موتورهای استپر برای منتقل کردن قطبهای مغناطیسی از مگنتها به دندانههای موتور از روش stacked plate (در شکل زیر نشان داده شده است.) استفاده میکنند.
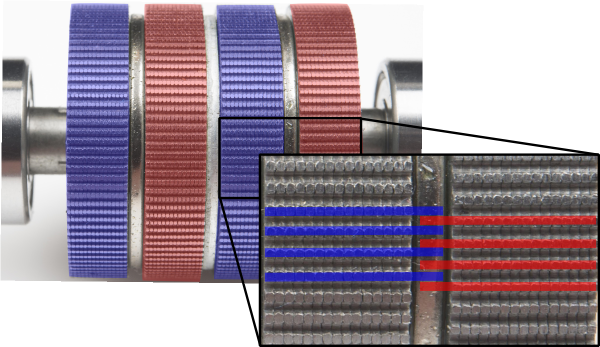
در یک موتور براشلس( بدون جاروبک)، گفتیم که از EMF تولیدی استفاده میشود که سرعت را اندازهگیری کنند. اما در یک استپ موتور عملکرد صحیح مبتنی بر قرارگرفتن به موقع سیمپیچها در موقعیتهای بعدیشان است. در سرعتهای بالا ممکن است گاهی روتر نتواند با ریتم این قرارگرفتنهای سیمپیچها همآهنگ شود. در این صورت موتور متوقف خواهد شد. اما نگران نباشید، برای حل این مشکل راهحل های متعددی وجود دارد. هرچند که فهم آنها نیازمند داشتن دانشی عمیقتر در مورد رابطه میان سیمپیچهای موتور با اندوکتناس و … است؛ فلذا فعلا و در این آموزش از آن میگذریم.
نقاط قوت موتورهای استپر
- تعیین موقعیت بسیار دقیق
- گشتاور بالا
- قابلیت اطمینان بالا
- معمولا دارای ابعاد استاندارد و متناسب
نقاط ضعف موتورهای استپر
- فاصله کم میان گامها، موجب محدود شدن سرعت استپ موتور میشود.
- در صورتی که میزان بار موتور بالا رود، ممکن است موتور از برخی گامها جهش کند که عملکرد معیوب خواهد شد.
- استپ موتور در تمام مدت کار، حداکثر جریان را میکشد.
موتورهای خطی – پرچمدار نسل آینده موتورها!

بله، درست شنیدید! موتورهای خطی آینده موتورها را در اختیار خود خواهند داشت. چرا؟ چون هر چه رو به جلو میرویم، سرعت موتورها بیشتر و بیشتر در معرض اهمیت و توجه قرار میگیرد. از طرفی، به دنبال سرعت بالا، بحث اصطکاک مطرح میشود. وجود اصطکاک مسئلهی چگونگی کاهش و نگهداری سالم موتور را به میان آورد. بنابراین طول عمر موتورها حتما بیش از پیش مورد توجه قرار خواهد گرفت. بدیهی است که موتورهای با طول عمر پایین نخواهند توانست در بازار رقابت باقی مانده و تولید ثروت کنند.
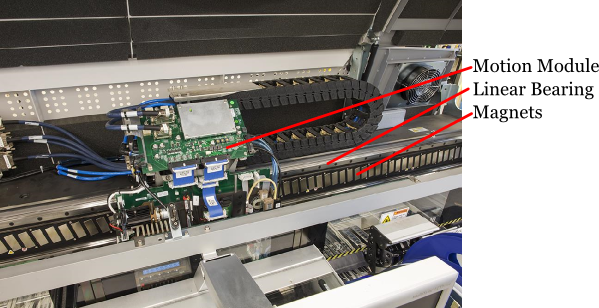
اما! داستان در همین نقطه ظاهرا یاسآور خاتمه نمییابد! در صورتی که قسمتهایی از موتورها که مولد حرکت گردشی هستند را با قطعاتی جدید که حرکت خطی تولید میکنند جایگزین کنیم، موتورها به لحاظ فاکتورهای ذکر شده، عملکرد به مراتب بهتری خواهند داشت. موتورهای خطی سبکتر اند، نگهداری و حفظ آنها از عوامل فرساینده ماننده اصطکاک سادهتر است، سرعت آنها به به شکل خارقالعادهای بالاتر است و نیز از آنجا که تنها یک بخش متحرک آن هم با حرکت خطی دارند، بسیار قابل اطمینانتر هستند. به عنوان یک مثال برای موتورهای خطی، تصویر بالا یک ماشین پیک اند پلیس(pick and place) را نشان میدهد که از آن در صنایع تولیدی استفاده میکنند و سرعت بسیار بالایی دارد. این دستگاه از چنان میدان مغناطیسی قویای برخوردار است که معمولا هشدارهای لازم برای افرادی که از دستگاهای کنترل ضربان قلب استفاده میکنند بر روی آن وجود دارد. مگنتهایی که درون آن به کار رفته اند از کانیهای کمیاب و قدرتمند معدنی هستند.
ساختمان موتورهای خطی
- خب، نگاهی مختصر داشته باشیم، به درون یکی از همین ماشینهای پیک اند پلیس.
- ماژول راهانداز – شامل الکترومگنتها و کنترلر.
- مگنتها – یک میدان مغناطیسی فراهم میکنند که باعث جذب و دفع سیمپیچها و در نتیجه به حرکت در آمدن آنها میشود.
- یاتاقانهای خطی – تها بخش متحرک موتور خطی که حرکت موتور را با مگنتها تراز نگه میدارد.
عملکرد موتور خطی
ساختار مکانیکی موتورهای خطی تا حدودی به موتورهای براشلش شباهت دارد. کافیست فرض کنید که یک موتور براشلس را بگیریم و بصورت خطی آن را از هم باز کنیم. ( به تصویر بالا نگاه کنید.) با این کار آن را تبدیل به یک موتور خطی کردهایم! پیچیدگی از آنجا آغاز میشود که ترتیب اعمال نیرومحرکه به سیمپیچها چگونه باشد که الگوی تغییرات آنها با حرکت موتور هماهنگ شود. . میدانیم که پلاریته هر سیمپیچ، توسط جهت جریان عبوری از آن تعیین میشود و معکوس کردن جهت جریان جهت پلاریته را هم عوض میکند. بنابراین در صورت استفاده از یک جریان متناوب هر سیمپیچ دچار رانشهای رو به جلو و عقب به صورت متوالی میشود.
امکانی که در یک موتور خطی وجود دارد این است که مجهز به یک اینکودر یا سیستم تعیین موقعیت دقیق است که حرکت های قسمت متحرک موتور را بدقت دنبال میکند. و از آنجا که میخواهیم دقت و سرعت این موتورها بالا باشد، کنترلر های آنها بسیار پیچیدهتر از کنترلر های سایر موتورها درنظر گرفته میشوند و برای آنکه مگنتها وادار به حرکتی دقیق و پیوسته شوند، از روشی به نام میکرواستپینگ استفاده میشود. بنابراین واضح است که کنترلر هایی که در موتورهای خطی استفاده میشوند تا چه اندازه باید قدرتمند باشند و هرچه تکنولوژیهای ساخت و طراحی کنترلرها پیشرفته تر و گسترده تر شود، ما در آینده موتورهای خطی قدرتمند تر و البته ارزانتری خواهیم داشت. و با این اواصاف هیچ بعید نیست که در آینده پرینترهای سهبعدی ای داشته باشیم که به جای آنکه ساعت ها طول بکشد که چیزی را پرینت کنند، همان کار را در چند ثانیه ناقابل به انجام برسانند.
نقاط قوت موتورهای خطی
- قابلیت اطمینان بالا
- سرعت بالا
- بهرهوری بالا
- بی نیاز از مدل تبدیل حرکت دورانی به حرکت خطی
نقاط ضعف موتورهای خطی
- گران
- نیازمند کنترلرهایی که به صورت منحصربه فرد طراحی شده باشند.
- طراحی خاص هر موتور خطی متناسب با کاربردی که مدنظر است.
- خیلی گران! ( محض تاکید!)
Source: https://learn.sparkfun.com/tutorials/motors-and-selecting-the-right-one
منابعی برای مطالعات بیشتر
بسیار خب! به انتهای این آموزش رسیدیم؛ خسته نباشید! چند نوع از انواع موتورها را با هم شناختیم و کارکرد و ساختمان آنها را بررسی کردیم. بنابراین حتما حالا دیگر متوجه شده اید که برای اینکه بتوانید یک موتور را به درستی برای کار خود انتخاب کنید، ابتدا باید بدانید که این موتور قرار است چه وظیفهای را بر عهده بگیرد. و با درنظر گرفتن این نکته، به نقاط قوت و ضعف هر گروه از انواع موتورها نگاهی بیندازید. و از اینها مهمتر، حتما نرخ بازدهی موتورها را هم بررسی کنید. بر روی اغلب موتور ها میزان توان ورودی و خروجی شان درج شده است و میتوانید میزان بار مورد نیاز و قابل تحمل آنها را محاسبه کنید. اما راه دیگر هم آزمایش عملی آنهاست!
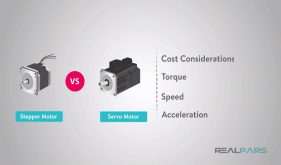
اگر دوست داشتید بیشتر در مورد موتورها بدانید، مقالات اینجا احتمالا پیشنهادات خوبی خواهند بود. همچنین در مورد سروو موتور هم توصیه میکنم بخوانید.
اگر این نوشته برایتان مفید بود لطفا کامنت بنویسید و همچنین میتوانید اپلیکیشن اندرویدی آموزش الکترونیک را هم نصب کنید.
سلام خیلی هم خوب بیان شده و اطلاعات خوبی دادید موفق پیروز باشید
سلام وقتتون به خیر. من در این زمینه تازه کار هستم و نیاز به راهنمایی شما عزیزان دارم. ببینید من میخوام یه پروژه ای رو انجام بدم که یک جسم حدودا نیم کیلویی رو باید به یه موتور وصل بکنم که با سرعت اروم (مثلا 10prm) دور محور به طور ممتد بچرخه. میخوام زمان طولانی دوام داشته باشه مثلا اگر سوییچ رو روشن بذارم تا یک سال هم به این چزخیدن ادامه بده داغ نکنه خرابم نشه. آیا همچین چیزی ممکن هست یا خیر؟ اگر بله ممنون میشم راهنمای کنید چجور موتوری باید بخرمک و رنج قیمتش به چه صورته؟ تا جایی تحقیق کردم موتور گیربکس دار 12v و 10prm باید بخرم. حالا نمیدونم به باتری وصل کنم بهتره یا یجوری به پریز برق. آیا برنامه نویسی هم نیازه برای این هدفی دارم؟ خیلی ممنون که زمان گذاشتین و خوندین دوستان
با سلام و تشکر از اطلاع رسانی شما ! کار قشنگ و اجتماعی انجام داده اید.